“実世界で生活できるロボット”を目指し、二脚ロボットの研究を続けるカリフォルニア工科大学の研究所「Amber lab」。彼らは、ロボットを転ばせようとするなどして負荷をかけることで、ロボットの性能を高め進化させてきた。何度も繰り返すそんな実験は、ロボットの歩行に関する新しいアルゴリズムを最適化し、“どんな環境でも二足歩行できるロボット”を具現化しようとしている。さらにそこで得た知見は、ロボット義足の開発にも適用されているという。ロボットの歩き方の進化は、同時に義足ユーザーのあらゆる可能性も高めているのだ。
ロボットの可能性は、義足の可能性でもある
カリフォルニア工科大学にあるAmber(Advanced Mechanical Bipedal Experimental Robotics)Labが目指しているのは、人間が取り組めることであれば、なんでもできるというロボットの開発だ。
同ラボのロボット研究家、アーロン・エイムズ氏は、自分たちが作るロボットは、「芝生も砂利道も、雪や氷の上も歩けるものにしなければならない」と明言する。そのために歩行を数学的に理解し、常に改良を加えることで「ロボットを人間のように、効率的かつダイナミックに、そしてスムーズに歩けるようする」という。
それを実現させるために同氏が率いるチームは、トレッドミル(ウォーキングマシーン)の動きに合わせて歩くロボットを何度も転ばせようとしたりして、常にアルゴリズムを最適化している。ちなみに、歩行するロボットを転ばせようとすることは、「かく乱試験」と呼ばれる。
そうやって得られた数値をもとに、例えばミシガン大学では、ロボットに火の中を歩かせたり、セグウェイに乗せたりと、さらに多様な実験も行われているという。
ロボットにあらゆる負荷を与え、構造化されていない未知の環境でいかに機能させるかを模索する。そうやって人間のような歩行に近づけていくのだ。
さらにAmber Labでは、ジャンプする動作も追求するために、ピストンのように上下に跳ねるロボットの実験も盛んに行われている。それらの試みは、まず単純なロボットで行われ、得られた知見をもとに、より複雑なロボットへと応用されていく。そういった作業を繰り返すことで、ロボットの性能に何が足りないのかが明確化される。
さて、これらのロボットで獲得した成果は、電池式のロボット義足“Ampro”の開発にもすべて適用されているという。
アーロン氏は、「ロボットで目指していることは、すべて義足でも実現したいと思っている」と語る。“Ampro”は膝と足首にモーターが入っていて、バネが組み合わされた画期的なプロダクト。ユーザーの歩いている場所の状況をセンサーで検知して、必要な場合はモーターを作動させる。そしてユーザーと同期させることで動かすという仕組みだ。
「義足を装着した人が走ったり、サッカーをしたり、ジャンプをしたりできるようにする」。Amber Labの開発実験から、ロボットだけでなく、義足の新しい未来も見えてきた。








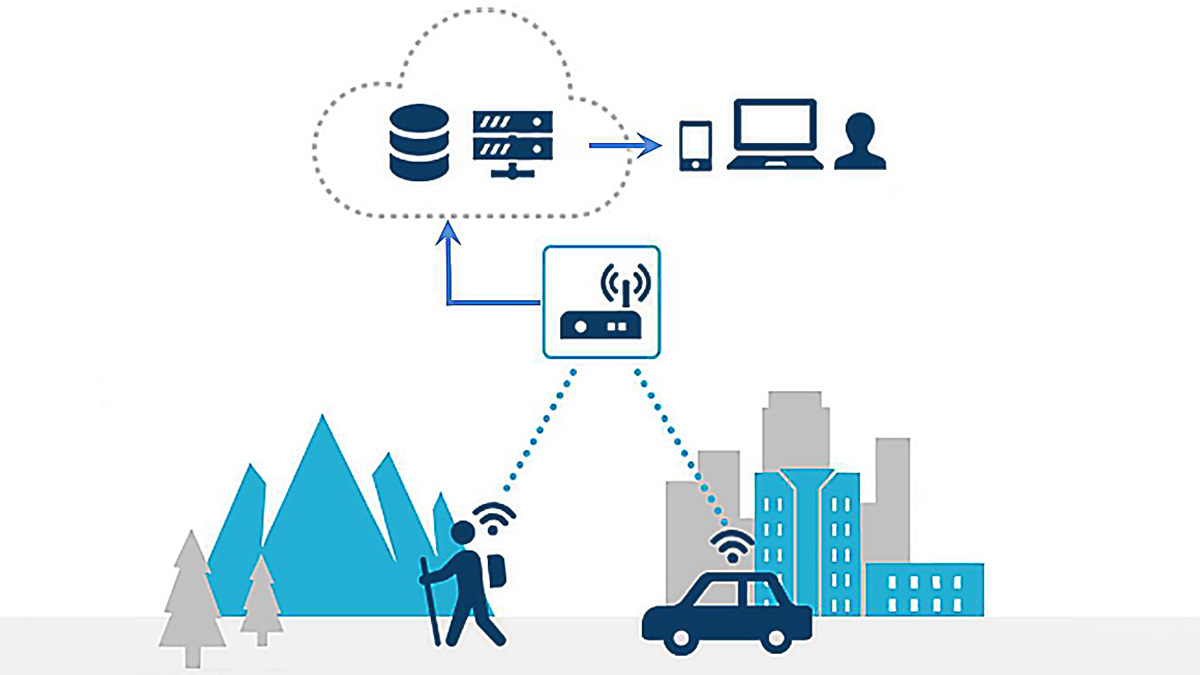
 本製品は、高齢者や視覚障がい者が使用する杖や白杖を使い、見守りサービスを可能としたもの。GPS と加速度センサー、通信モジュール内蔵の IoT 機器を市販の杖に取り付け、オートバックスセブンが開発したクラウドサービスに連携することで、外出をした際の位置や移動情報、また転倒情報まで、家族や介護者が確認できる。見守りサービスとして提供される予定で、2019年の実用化を目指している。
本製品は、高齢者や視覚障がい者が使用する杖や白杖を使い、見守りサービスを可能としたもの。GPS と加速度センサー、通信モジュール内蔵の IoT 機器を市販の杖に取り付け、オートバックスセブンが開発したクラウドサービスに連携することで、外出をした際の位置や移動情報、また転倒情報まで、家族や介護者が確認できる。見守りサービスとして提供される予定で、2019年の実用化を目指している。