現在、コロナウイルスの影響もあり、物流業界は激動の時代を迎えている。E-コマースのニーズが激増し、企業・個人間の取り引きが今までにないほど増えているにもかかわらず、労働人口の減少や、現場労働者の高齢化により、人手不足が深刻になっているからだ。そんななか、AIとロボットを活用し、物流業界に革命を起こそうとしているのがGROUND株式会社だ。同社がめざすのは先端テクノロジーを活用した物流施設の最適化だという。果たして、物流施設の中では、いま何が起こっているのだろうか。2015年に同社を立ち上げた取締役社長の宮⽥啓友氏に、編集長・杉原が、物流業界の課題と同社のミッションについてうかがった。 ・物流倉庫におけるロボット化、AI化の流れ ・ECの物流波動はプロでも先が読めない ・在庫の配置もAIで解析し最適化する
物流倉庫における
ロボット化、AI化の流れ
杉原:まず御社の事業を、読者の方にわかりやすく説明していただけますでしょうか?
宮田:我々がめざしているのは世界中の先端テクノロジーを活用して物流施設、つまり倉庫の運営を最適化することです。時代背景を説明すると、1970年代までは物流倉庫は主に港湾地域に限定されて建設されており、非常に閉ざされた世界でした。そこから高度経済成長下でフォークリフトが導入され、2000年代までその流れが続きます。2000年前後からはコンビニなどの小売流通が発展し、比較的きめの細かい物流作業が発生し、それに伴って物流施設の中でウェアハウスマネジメントシステム(WMS)、倉庫管理システムというものが使われ始めます。一方で、もともとは自動車のライン生産に供給するためのバックヤードとして誕生した、自動倉庫というものがありました。2010年くらいまでは、そのWMSと自動倉庫くらいしか、いわゆる倉庫を合理化する機器はありませんでした。ところがECの発展により、説明するまでもなく、物量が飛躍的に増加しました。物流施設での作業はもはや人手だけでは困難になり、ましてや日本は少子高齢化の中で、そもそも雇用が確保できない。ECという新しいインフラを支える物流と、業界の実情が大きくかけ離れてしまったのです。
杉原:顧客ニーズが間違いなく既知なのに、技術的なところが未知であるという状況ですね。
宮田:そうですね。そこで、ようやくそのギャップを埋めていくために、ロボット、AIというテクノロジーが注目・活用され始めました。製造業界から10年ほど遅れているのですが、電気自動車の普及によってリチウムイオンの単価が劇的に下がった結果として、我々が提供する物流ロボットも、ようやく投資対効果が見合うようになってきたという流れです。さらに、SLAM(Simultaneous Localization and Mapping:センサーによって周囲環境を把握し、マップをつくりつつ、取得したデータをもとにロボットの自身の位置も推定する技術)技術も進化し、原価の低下と技術の進展がちょうどいま交わったところで、次世代型物流施設というものが求められ始めている。AIなどの先端テクノロジーを活用していかに物流(倉庫)を最適化するかという、この領域を我々はめざしています。

GROUNDが中国のロボットメーカーと共同開発したAMR(自律型協働ロボット) 「PEER(ピア)」。倉庫内作業の「ピッキング」工程において、人と協働しながら作業支援を行うAMR(自律型協働ロボット)。
杉原:具体的には、どういう方法になるのでしょうか?
宮田:例えば、物流機能を有する事業者さんに対して、オープンな物流プラットフォームの構築・提供を目指しています。いわばOSですね。でも、例えばiPhoneのiOSはAppleだけのアプリケーションですが、我々はAndroid的なものを提供したいと考えています。

自律型協働ロボット「PEER」を使用したピッキング作業の様子。オーダーが入ると、ロボットは自ら対象商品が格納されている棚の前まで移動し、停止する。作業者は自分が担当するエリアで待機しているロボットを見つけ、タブレットの指示に従って商品をピッキングし、ロボットのバスケットに商品を入れるだけでよい。
杉原:要は参入障壁を低くすることによって、規模を広げていくということですね。あえてモノポリーされているiPhone型のiOSではなく、Android型を選ばれたのはなぜですか。1970年からの流れがあって改革が起きにくい潮流があったからなのか、それともほかに理由があるのでしょうか。

宮田:2つ理由があって、ひとつはどのような形であれ、EC・物流のリーディングカンパニーであるAmazonに対抗しなければならないということです。彼らはフィラデルフィアに500人以上のデータサイエンティストとエンジニアを集めて、物流オペレーションを高度化するための技術開発を行い、毎年1兆円もを物流へ投資しています。まさにアップルがiOSを囲い込んでいるように、自分たちの物流オペレーションを高度化して独占しています。そんなことは、一企業にはもはやできません。そう考えると、おそらく産学官や民間連合などの、ゆるやかなコンソーシアムでオープンなプラットフォームを作ってAmazonに対抗しないと、技術的にも追いつかないし、投資規模としてもかなわない。
杉原:そうですね。まず、マスが違いますよね。
ECの物流波動は
プロでも先が読めない
宮田:もうひとつは、楽天に勤めていた時にめざしていた構想をクラウドで実現したいという想いがありました。EC物流は、車や白物家電を製造する上での製造物流とは全く違います。例えば、製造業の部品を提供するための物流は、生産計画に基づいているので、明日どれくらいの物量を工場に供給すればいいかわかっている。一方でECはダイレクトに消費者に対して商品を供給するので、例えば、●●スーパーセールで明日どれくらいの物量があるのかは、社内の市場のデータ解析をする専門チームをしても読み切れないんです。

杉原:そうなんですか? 結構読んでいるのかなと思っていたのですが。
宮田:読めないですね。物流ハブをどこに置くかというのも空ぶりになったりと、非常に難しい。それに加えて、ロングテール化の問題があります。つまり、ECでは販売機会の少ないニッチな商品でも色やサイズなどを幅広く取り揃える戦略が主流となっています。ユーザーとしては非常に便利ですが、届ける側は必ずこれを在庫しておかなくてはいけない。こういった消費者ニーズの複雑化・高度化などに伴う様々な制約が生まれる物流を最適化するには、従来の倉庫や物流センターの設備だけでは、もはや成り立たず破綻寸前にあります。こういう非常に高度で複雑な判断が伴い、かつ制約が厳しいオペレーションに対して、あらかじめ予見することはそもそもできない。予見できないから、変化や異常をすぐに察知して、異常に合わせられる、そういう柔軟な仕組みを我々は作っている。必ず前提条件は崩れるものということに基づき、ロボットもAIソフトウェアも開発されています。
杉原:そのアルゴリズムの変数の作り方は異常と変化というところから始まっていて……。
宮田:まさにそうですね。それをいかに迅速に察知して視覚化できるかということをめざしています。
杉原:面白いですね。大手物流事業者でさえできなかった、もしくはまだ難しいところを、物流の部分からディープラーニングさせてコントロールしていくという考え方ですよね。
宮田:そうです。いま、いわゆる購買データと物流センターの在庫の配置の連携は全くとれていなくて、完全に分断されているのが現状なのですよ。
杉原:医療と製薬会社の関係にちょっと似ていますよね。その分断されているものに、歩み寄っていくという考え方に近いのでしょうか。
宮田:そうです。連携を真ん中の物流施設から実現していく。それが、我々が開発しているインテリジェントロジスティックスというソリューション全体、次世代型物流施設の基盤です。PEERという自律型協働ロボットも開発していますが、そのロボットの持っているロボットコントロールシステムと、事業者が使っているウェアハウスマネジメントシステムを、全部ミドルウェアでつなぎこむんですね。そして、つないだものをすべて「Intelligent EYE」というダッシュボードで可視化していくのです。
在庫の配置も
AIで解析し最適化する
宮田:いまの物流センターは、いまだにホワイトボードに進捗を書いて、勘と経験をベースに人を配置しています。我々はそういったものを、可視化していく。自社開発したDyAS(ディアス)というAI物流ソフトウェアは、在庫やPOSデータなど事業者が有する様々なデータを集計・分析し、例えば明日販売する予定の商品を手前に持ってくるとか、明日はサプライヤーから通常より1.5倍くらいの商品が入ってくるから人とロボットをそれぞれどれだけ配置するかを、AIを使って計算・シミュレートし、可視化ツールのIntelligent EYEを通じて現場の管理者に示す。こういった仕組みを、いま構築し始めています。
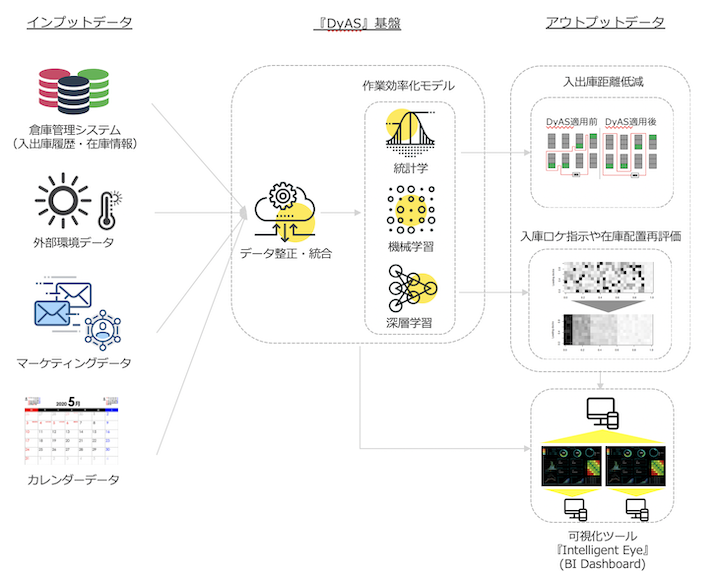
同社がオリジナル開発したAI物流ソフトウェア「Dynamic Allocation System(DyAS)」。物流倉庫における業務ナレッジや内部・外部データを蓄積・解析し、流施設管理者の意思決定をサポートすることにより、在庫保管効率や物流作業効率を向上させる。
杉原:ということは、このIntelligent EYEとDyASが基本的には核となっていて、実は御社のPEERとかButlerとかのロボットに関しては、アウトプットとしてはほかのものでもいいわけですよね。
宮田:そうです。現場のロボットは、デバイスでしかありません。中長期的には我々はロボットの開発ステージからは離れ、ロボットの仕組みに様々なものを接続・最適化させていくことにより注力するつもりです。
杉原:ロボット化のほうに行くのであれば、圧倒的な資金力とマスプロダクションが得意なところとの競争になってしまうから、コアのビジネスをやっていくということですね。僕らも実はいま、御社と本当に同じような考え方をしているんです。歩行解析ロボットに取り組んでいるのですが、ユーザー側はカメラがあれば、僕らのほうのフィジカルバンクにアクセスできるんですね。
宮田:最終的にはETLポータルを通じて、いかにデータを取得できる仕組みを作るかという方向ですよね。その礎を我々は作っています。スーパーはある程度、野菜、精肉とカテゴリごとに商品がありますが、物流施設は必ずしもそうである必要はない。ポピュラリティと言うのですが、あるものと別のものがセットで買われる傾向があるとしたらAIが分析して、カテゴリが違っても、合理化を考えたときには隣同士に配置してもいいわけです。

杉原:実は消費比率が全然違うから、ティッシュペーパーと洗剤を一緒に買うわけないですもんね。
宮田:そうです。ドラッグストアでは同様のカテゴリで陳列していても、物流施設内はそうある必要はない。ましてや違うブランドやメーカーが混ざっていても全くかまわないわけです。そういう考えに基づいて、あくまでも出荷するうえでの生産性、どのような配置をすれば最短時間で処理ができるのかをAIを使って解析・シミュレートしています。
宮⽥啓友(みやた・ひらとも)
株式会社GROUND 代表取締役社⻑/CEO
上智⼤学法学部卒。1996年 株式会社三和銀⾏⼊⾏。2000年 デロイトトーマツコンサルティング(現:アビームコンサルティング)⼊社。⼤⼿流通業を中⼼にロジスティクス・サプライチェーン改⾰のプロジェクトに従事。2004年 アスクル株式会社⼊社。ロジスティクス部⾨⻑として⽇本国内の物流センター運営を⾏う。2007年 楽天株式会社⼊社。物流事業準備室⻑を経て2008年 物流事業⻑就任。2010年 楽天物流株式会社設⽴、代表取締役社⻑就任。2012年 楽天株式会社執⾏役員物流事業⻑就任。同年フランスのフルフィルメントプロバイダAlpha Direct Services SASを買収し、マネージングディレクターを兼務する。2013年アメリカのフルフィルメントプロバイダWebgistixを買収。2015年4⽉ GROUND株式会社設⽴。










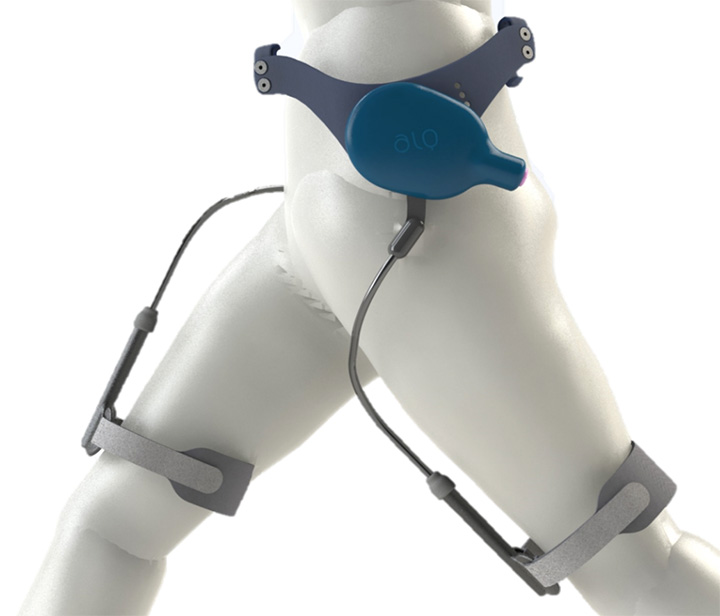 佐野:ご高齢の方がaLQ(アルク)を使うと、「10年くらい前に戻った気がする」とおっしゃるケースもあります。その頃の歩き方を明確に覚えているわけではありませんが、「機械に作られた動きではなく、自然な感じで歩きやすくなった」という声を多くいただきます。
佐野:ご高齢の方がaLQ(アルク)を使うと、「10年くらい前に戻った気がする」とおっしゃるケースもあります。その頃の歩き方を明確に覚えているわけではありませんが、「機械に作られた動きではなく、自然な感じで歩きやすくなった」という声を多くいただきます。