人命救助はもちろん、高所や危険地帯で、あらゆる作業をこなしてくれるロボットは、多大な可能性を秘めている。その開発や技術はまさに日進月歩。昨今はAIを組み込むことで、さらに画期的なパフォーマンスを可能にしたプロダクトが続々と登場するようになった。なかでも世界176ヵ国でイノベーション・テクノロジーサービスを展開するドイツの企業、FEST(フエスト)が発表した「バイオニック・ソフトハンド」は、人間とそっくりな動きをすることで話題を集めている。その驚くべきテクノロジーとは?
仮想世界で自ら学習する、
安心安全な有能プロダクト
ドイツを拠点に、世界中でイノベーション・テクノロジーサービスを提供するFEST は、車輪型にも変形するクモ型ロボットや、古生代に棲息していたアノマロカリス型ロボットなどを続々と発表し、注目を浴びてきた。
そんな先端企業が次に手掛けたのは、空気圧ロボットと AI を組み合わせた「バイオニック・ソフトハンド」と呼ばれるソフトシリコン製ロボットだ。
この新たなプロダクトの大きな特徴は、人間の手と見間違えるほどのスムーズな動きをすることだが、ロボットそのものの内部には、骨に当たる構造がない。空圧で膨らむ蛇腹が弾性線維で編まれた表皮に包まれているため、とても柔らかく、人間が直接触っても極めて安全だ。そのため、工場での人間との作業連携においても心配は無用だ。
柔らかでありながら物をしっかり掴むというハイパフォーマンスや、12面体を激しく動かしても落とすことはない器用さを生み出しているのは、指先に配備された慣性(移動)センサーと力覚センサーだ。
これらセンサーは、手や指が動いているときのみならず、静止しているときもロボットの制御システムにフィードバックを提供する。人間でいえば、触覚のような役割を担っている。
しかも「バイオニック・ソフトハンド」は、センサーで情報を読み取りながら、タスクを実行する方法を自分自身で学習する。その工程は、AI と機械学習を搭載したデジタル・ツイン(仮想世界で現実の状況を再生・訓練)を使用するため、現実世界での経験を積むことなく、仮想的に何十億回も間違いをおかして、自らパフォーマンスレベルを高めていく。
これだけ安全面、機能面で信用度が高いロボットハンドならば、あらゆるタスクへ活用を期待せずにはいられない。今後のさらなる進化と具体的な実用化を待ちたい。
[TOP動画引用元:https://youtu.be/5e0F14IRxVc]








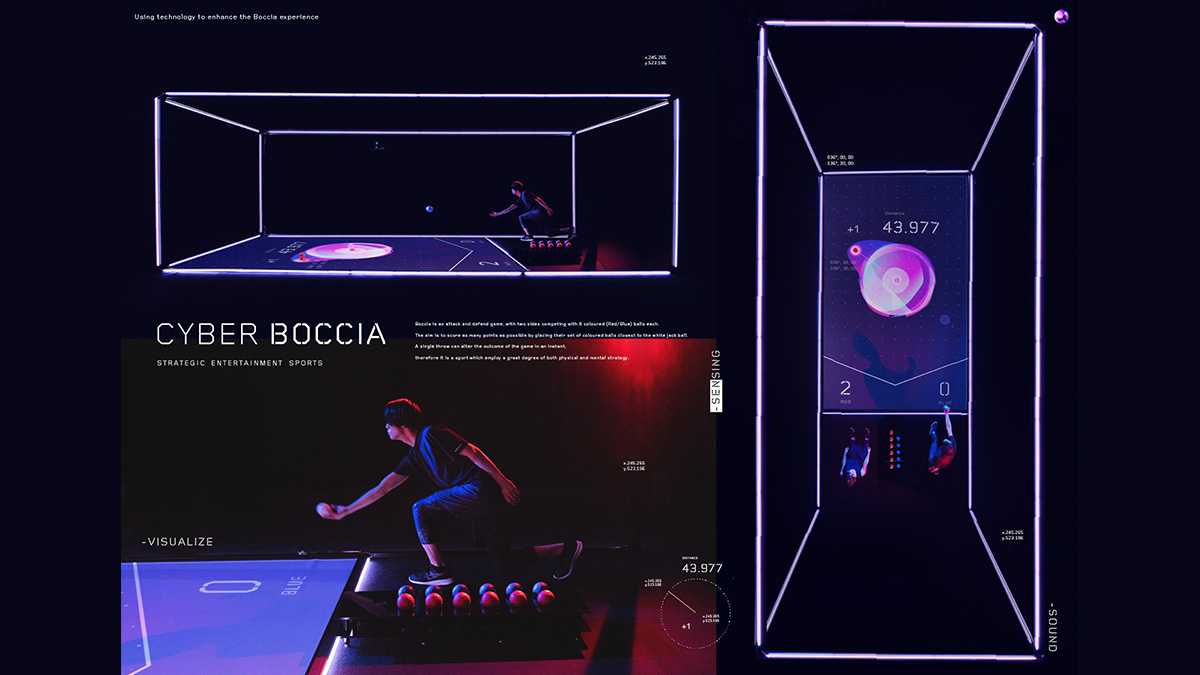
 ボッチャの本質であり、醍醐味ともいえる“戦略性”は、リアルタイムトラッキングとプロジェクションで、エモーショナルに美しくデータビジュアライズ。試合を盛り上げてくれるのは、一投ごとに生成されるサウンドと、それに連携して変化するLEDライト。サウンドはプレイの流れに応じて変化しながら、クライマックスに向けて、高揚感をたっぷり演出してくれる。
ボッチャの本質であり、醍醐味ともいえる“戦略性”は、リアルタイムトラッキングとプロジェクションで、エモーショナルに美しくデータビジュアライズ。試合を盛り上げてくれるのは、一投ごとに生成されるサウンドと、それに連携して変化するLEDライト。サウンドはプレイの流れに応じて変化しながら、クライマックスに向けて、高揚感をたっぷり演出してくれる。