目次
2020年の東京オリンピック・パラリンピックを前に、目覚ましい進化を遂げている車いすやモビリティ。モビリティに関するシステムやデバイス開発のための支援プロジェクト『モビリティ・アンリミテッド・チャレンジ』について以前HERO Xでも紹介したが、主催の一般財団法人 トヨタ・モビリティ基金(以後、TMF)が今年の1月に、製品化を目指す最終候補5チームを発表。利用者の起立・着座を可能にし、立位状態で走行できる電動式車いす「Qolo」を開発した、筑波大学のチームがファイナリストとして選出された。 最終審査、優勝チームの決定はまだこれからだが、若手デザイナーやエンジニアの育成を目指すジェームズ ダイソン アワードでも2014年度の国際準優秀賞に輝いた「Qolo」はひときわ注目を集める存在だ。開発をつとめた、筑波大学システム情報系研究員の江口洋丞氏にインタビューを行った。
想い通りに動かせる気持ちのいい機械を作りたい、
が開発のモチベーション
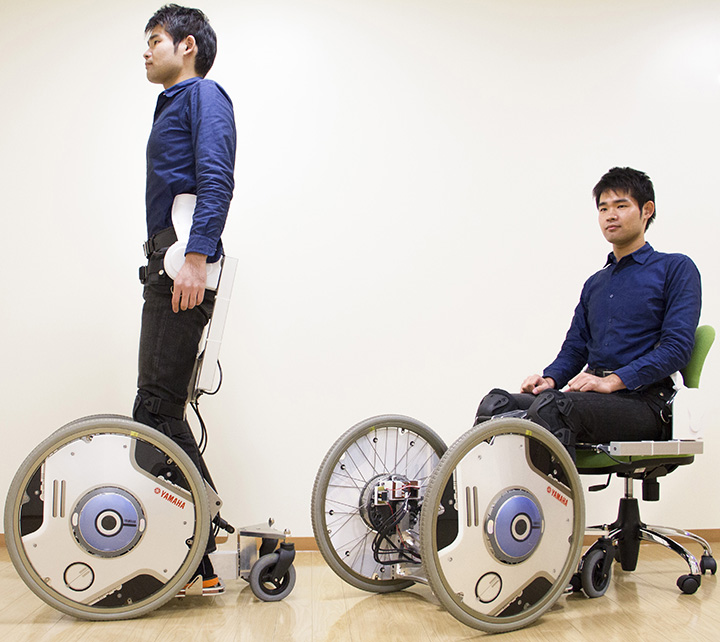
下肢に障がいを抱える人が直立姿勢での移動と動作、着席動作を支援してくれる移動機器「Qolo」。
立った状態での移動や動作が可能になり、使用者は上半身を前後に傾けたり、胴体をねじることで、起立、着席、前進や方向転換を行うことができる。棚から物を取る、料理するなど、車いす生活ではなかなかうまくできない日常動作までカバーできる、画期的なアイテムだ。丸みを帯びたフォルムやシンプルかつスタイリッシュなデザインはセグウェイなどの海外プロダクトを思わせる。
「もともと車やバイクが大好きだったんですよね」と江口氏は Qolo 開発のきっかけについて笑顔で語りだした。

「自分の思い通りに動く、気持ちのいい機械を作りたいというのが大学でサイバニクスを専攻したいと思った動機でした。そこから車いすに着眼したのは、祖母が浴室で転倒して足を骨折し、不自由している様子を目にしたからです。それまで、自分の身近なところに歩けない状態の人がおらず、目につかなかったせいもありますが、棚に手が届かない、自分で買い物にいけない、座った状態でいなければならない、など制約の大きさに初めて気付きました。
健常者は機能に多少違和感があっても、自分自身で何かしら補正することができますが、障がいを抱え、支援を必要としている人には機械がその機能を適切に果たす必要がある。
健常者となるべく近い動きで立ち上がる、座るという動作を実現することは、ずっと私が抱いていた『想い通りに動かせる機械』を作りたいという興味と合致すると思ったんです」(江口氏)
「実験装置」を「モビリティ」に進化させるため、
芸術学部との共同開発に
研究室配属が決まった大学4年からQoloの開発をスタート。
「まだこの世の中に存在しない構造のものを作り出すわけですから、自分で設計した図面を見て『作りにくいものを考えてしまったな』とも正直思いました。それぞれ40センチ、50センチくらいある下腿と大腿を支えることになるので、必要となる部品も大きく、精度よく作ることがなかなか難しくて。機能面の特徴としてはハンズフリーで移動できることが挙げられるのですが、あれもこれもと欲張って最初に詰め込みすぎたこともあって、『ここまでできていれば満足だろう』というギリギリのラインまで機能を絞り込むことにも苦心していました」
度重なる実験や検証の末、完成した1号機はその優れた機能性が評価され、2014年ジェームズ ダイソン アワード国際準優秀賞に輝いた。
この段階ですでに2号機の基本構造を固めており、一般の人に使ってもらうためには、より取っつきやすいインターフェースを考慮する必要性も感じていた江口氏は、同じく筑波大学の芸術学部の学生であった清谷勇亮氏とコラボレーション活動をスタート。
ジェームズ ダイソン アワード受賞時には、清谷氏からスタイリングのアドバイスを受けた2号機のコンセプトについても発表した。
実験に協力してくれる患者さんから薦められ、TMFの『モビリティ・アンリミテッド・チャレンジ』にも挑戦することとなり、活躍の場を広げてきた。
就職で一度遠ざかった開発。
博士課程の早期修了プログラムに志願し、再度研究の道に
ジェームズ ダイソン アワード受賞の翌年に大学院を卒業し、自動車メーカーにエンジニアとして就職した江口氏は一度 Qolo の開発から遠ざかったものの、後ろ髪をひかれる思いでいたと語る。
「初代のQoloから改良を重ねた2号機の設計図面を完成させて、材料も発注して届いたのに、組上がる前に大学院の卒業を迎えてしまったんです。私の所属していた研究室では個別に研究を行うことが多く、私が抜けてしまうとQolo の研究が滞ってしまいます。自分で設計した以上、最後まで形にしたいという思いがありました」
そこで江口氏が選択したのは筑波大学が社会人を対象に設けている、『早期修了プログラム』だった。一定の研究業績や能力を有していれば、標準修業年限が3年である博士後期課程を最短1年で修了し課程博士号を取得できるもの。国際学会で発表した実績があること、ジャーナル論文が掲載されていることなどの条件をクリアして、2018年から博士課程に入った。
エンジニアリング×デザインで
「つけていることを忘れる」を目指したい
昨年1年間、平日は会社員、休日は研究職と二足のわらじ状態だったが、この4月から、『モビリティ・アンリミテッド・チャレンジ』に専念するために研究員として筑波大学に戻ることになった江口氏。
製品化に向けて、使用者にとって必要なことをどのように落とし込んでいくか、まだ改良の余地があるとのことだ。
「まず、機械としてどう作るかという視点があったので、1号機の時点では正直想像で作っている部分が結構ありました。自分自身が被験者になることも多いのですが、起立・着席動作の際に下半身の筋肉を無意識に使ってしまうんです。しかし Qolo は下肢に麻痺がある人を対象としているので、筋肉を使って実験していてはダメなんですね。
実際、病院の患者さんに使ってもらって、ここは良い、ここはダメ、と意見もたくさんもらったのですが、まだ反映されていない部分もあります。生活の自立性を上げる目的で作っているのに、誰かに手伝ってもらわないと乗れないとか充電できないでは意味がないわけです。実験に参加してくれた患者さんに『体のどの部分に力を入れたらいいかわからない』と言われたことは大きな反省となっています」
たとえばパラリンピックで同じクラスの競技に出ている選手でも、障がいのレベルによって使用する装具が異なるように、一口に「下肢の麻痺」といっても麻痺のレベルによって、上半身を制御できるレベルも変わってくる。
麻痺のレベルが高く、上半身の制御が難しい場合は、現段階の試作機で想定する自由度が得られない可能性もあり、製品としてどこまで汎用性を持たせられるかは課題のひとつとなりそうだ。
「健常者にとって、朝ベッドから起きてすぐ乗って、夜ベッドに入るまでずっと乗り続けるようなものってなかなかないですが、Qoloは足に不自由がある人にとっては、かなり生活にべったり密着した乗り物なんですよね。
メガネをかけていることを忘れてメガネを探してしまうとか、ヘッドホンをつけているのに携帯を探してしまうことがあるように、『つけていることを忘れる』くらいのモノができれば、その人に与えるインパクトも大きいでしょうし、QOLを高めることもできるのではないだろうかと思います。
決してマスが大きい製品ではないですが、ばっちりニーズにハマる人には『こんな乗り物を待っていたんだ!』と思ってもらえるかもしれません。そこはデザインとエンジニアリングの組み合わせによって生まれるものだと思うので、ゆくゆくは機能を洗練させるためのデザインも自分で手掛けるようになれたら理想的ですね」
『モビリティ・アンリミテッド・チャレンジ』の優勝者は2020年・夏の東京で発表予定。
大きな可能性を秘めた「Qolo」を応援し続けたい。