パラスポーツを代表する競技のひとつ、「車いすマラソン」を観戦したことはあるだろうか?ロードレース用車いすに乗り、ハンドリムを手だけで操作してゴールを目指すあの競技だ。実際のレースでの最高速度は、なんと60km越え。見ているだけでは、そのハードさは中々実感しづらいものだが、それはこれまでの話。車いすマラソンで走るリアルな感覚を、誰もが体験することを可能にしたVRエンターテイメントが、この度誕生した。その名も、『CYBER WHEEL(サイバーウィール)』。開発を手掛けた株式会社ワン・トゥー・テン・ホールディングス(以下、ワントゥーテン)の東京オフィスを訪問した。
 “未来のウィールチェア”をかたちに
“未来のウィールチェア”をかたちに
設計のインスピレーションは、ロードレース用車いす
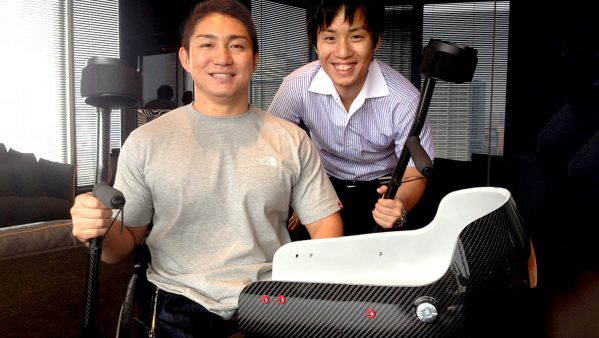
『CYBER WHEEL(サイバーウィール)』の機体は、実際のロードレースで使用されている「SPEED KING」を車いすメーカーの株式会社ミキより提供を受け、設計の参考としたオリジナルボディ。機体の素材には、宇宙・航空産業や鉄道、医療分野などでも使用されているFRP(繊維強化プラスチック)、シート、タイヤ&ホイールにはグラスファイバーを採用し、ダークグレーを基調にしたボディは、ウレタン樹脂塗装仕上げ。「空力などを考慮し、実際の未来の姿としての車いすをデザインしています」とワントゥーテンの開発担当者が言う通り、フューチャリスティックな趣だ。
シートに乗り、VRとヘッドフォンを装着したら、前傾姿勢で、車輪についたハンドリムを手で回す。すると、VR内の画面を進むことができる仕組みになっている。VR装着時に見えるのは、このような映像だ。
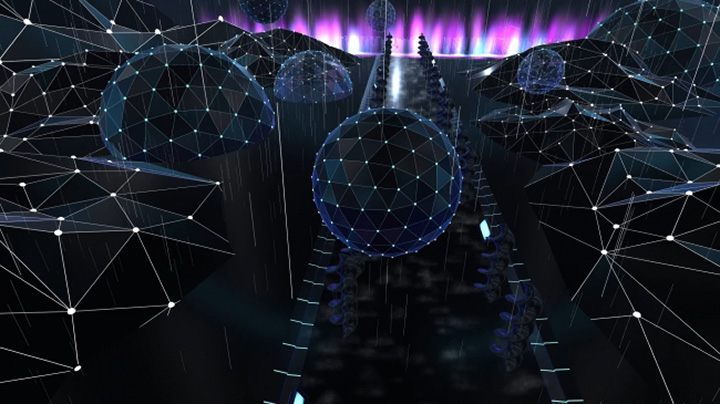
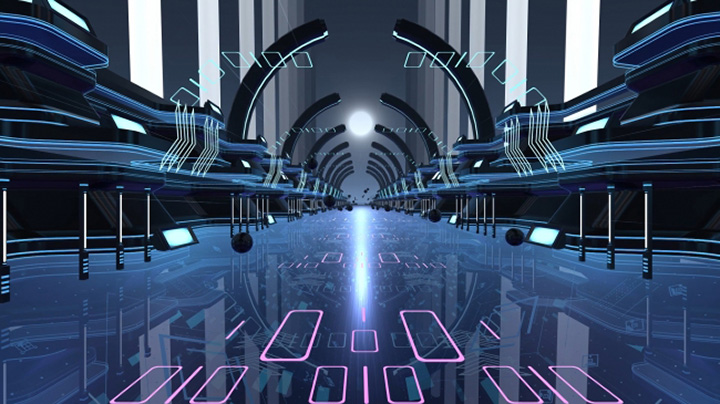 リアルの世界では、ハンドリムを手で回し続け、VRに広がる5つのステージを駆け抜けるタイムトライアルは、ゲーム感覚で楽しむことができる。行く途中には、カーブあり、障害物あり。それらをうまく避けながら、走り続けるのは中々ハードだが、それゆえ集中力も高まり、時が経つのも忘れて熱中してしまうほど。特筆すべき点は、VRの体感スピードが、世界のロードレースと同じスピードを再現していること。そして、トップアスリートのスピードの追体験も可能にしていることだ。
リアルの世界では、ハンドリムを手で回し続け、VRに広がる5つのステージを駆け抜けるタイムトライアルは、ゲーム感覚で楽しむことができる。行く途中には、カーブあり、障害物あり。それらをうまく避けながら、走り続けるのは中々ハードだが、それゆえ集中力も高まり、時が経つのも忘れて熱中してしまうほど。特筆すべき点は、VRの体感スピードが、世界のロードレースと同じスピードを再現していること。そして、トップアスリートのスピードの追体験も可能にしていることだ。
 デジタルテクノロジーの力で、パラスポーツを“エンターテイメント”に
デジタルテクノロジーの力で、パラスポーツを“エンターテイメント”に
ワントゥーテンが、このプロダクトを開発したのには理由がある。ひと言でいうなら、それは、パラスポーツの普及のためだ。同社代表取締役社長の澤邊芳明さんの言葉を借りるなら、「パラスポーツの普及について現在の課題は、“自分ごと化”できていないこと」。
本来、パラスポーツはエキサイティングで、戦略も求められる激しいスポーツ。だが、実際のところ、一般の人がそれを体験できる場はかなり稀少で、かつインストラクターも不足しているので、そもそも興味を持ちづらいのが現状だ。
パラスポーツをデジタルテクノロジーの力で、“エンターテイメント”という形に置き換えることで、日本中で体験会などを実施し、それらを通してより多くの人々にその魅力を知って欲しいーそんな想いから、ワントゥーテン「CYBER SPORTS」プロジェクトの第一弾として生まれたのが、車いす型VRレーサーこと、『CYBER WHEEL(サイバーウィール)』なのだ。
今年5月6日、都内で開催された東京都主催によるパラ体験イベント「NO LIMITS SPECIAL 2017 上野」のオープニングセレモニーでは、小池百合子都知事も体験し、「車いすを動かすのはいかに大変なことかというのを体感した」と報道陣の取材に語っている。もとい、大変だが、スリリングな感動にやみつきになりそうというのが、筆者の感想だが!ワントゥーテン「CYBER SPORTS」プロジェクトの今後の展開に要注目したい。
ワン・トゥー・テン・ホールディングス
http://www.1-10.com/
CYBER SPORTS プロジェクトページ
http://cyber.1-10.com/