目次
ウェアラブル端末と並んで、近年進化が目覚ましいアシストスーツ。身体機能を補助、拡張、支援してくれる装着型ロボットは、製造業、建築業、農業、医療・介護など多岐に渡る分野で活躍が期待されている。株式会社イノフィスが提供する「マッスルスーツ」はパワードスーツには珍しい、アクチュエータ(駆動源)に人工筋肉を用いた、この分野のパイオニアともいえる製品。「マッスルスーツ」の開発者であり、株式会社イノフィスの創業者でもある、東京理科大学 工学部機械工学科教授の小林宏氏に、開発経緯や課題、マッスルスーツが描く未来について話を伺った。
「本当に役立つものは何か」
との問いかけがマッスルスーツを作った

パワードスーツというと映画「アイアンマン」のような全身スーツを想像するかもしれないが、「マッスルスーツ」は上半身に着用し、腰・腕を補助するウェアラブル型ロボットだ。素材はアルミで、サイズはバックパック程度だが、人工筋肉に空気を供給することで、最大35.7kgf(140Nm=1メートル先にある14㎏のものを持ち上げられる力)の補助力を発揮。人や重い物を持ち上げる際に、中腰姿勢を保つサポートができる。
装着や操作方法もいたってシンプルで、販売を開始した2014年から、現在までの累計出荷台数は約4,000台( 2019年4月時点)以上にも上る。
小林氏が「マッスルスーツ」の開発をスタートしたのは2001年のこと。ソニーから AIBO、QRIO、ホンダから ASIMO が発売され、2足歩行型ロボットが脚光を浴びていた頃とほぼ同時期だ。
「当時は2足歩行型ロボットが脚光を浴びていましたが、2足歩行というのは機能のひとつに過ぎません。プログラミングでミリ単位の制御をしなければ、荷物を持たせてドアを開けるような動作もできず、悪路に行くとか災害現場で人を救助するとか、高齢者の歩行補助なんてとてもじゃないけど、できそうにはありませんでした。エンターテイメントとしては面白いけれど、僕たちは技術を熟知している分、それらが生活に組み込まれるとは思えなかったのです。
ちょうどその時期、ヒューマンロボットの国家プロジェクトが立ち上がって、2020年には産業ロボット以外の非製造ロボットが自動車産業並みになると推測されていましたが、そううまくはいかないだろうとも思っていました」(小林氏)

東京理科大学 工学部機械工学科教授・小林宏氏
本当に役に立つものを開発したい──それでは本当に役に立つものとは何か?と考えたときに、小林氏は「誰かに手助けされないと生きていけないことが人生において一番困ること」という答えにたどり着いたと言う。
「現在は社会的背景もあって、医療現場などで活用されていますが、最初は介護や福祉については特に考慮していませんでした。本質的な部分で『それを身に着ければ動けるもの』が欲しいと思ったんです」とウェアラブルロボットの開発当初について小林氏は語る。
はじめは、衣服に人工筋肉をつけて動かす「内骨格タイプ」を開発したが、衣服がずれることで動きに限界があること、引っ張る支点である骨や関節に負担がかかるため、体に不自由がある人、高齢者などには使いづらいことから「外骨格タイプ」に切り替えることとなった。
また、転倒のリスクを避けるため、最初は一番作りやすいと思われる腕の補助を行う装具から着手したが、実際に工場現場で検証したところ、作業者の多くが腰痛に悩んでいることを知り、2006年からは腰を補助するマッスルスーツの開発に取り組むことになったという。
軽くて柔らかい、
漏電の危険性も充電の必要もない
「人工筋肉」のメリットを活かして
機械工学のプロフェッショナルとして動くものを作る際に、アクチュエータに何を用いるかが非常に重要な要素であると小林氏は語る。よく使われるものはモーターだが、小林氏はマッスルスーツを開発するにあたって、人工筋肉を使うのが最適だと確信していたという。
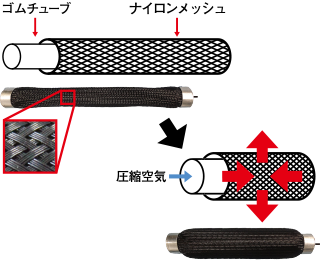
マッスルスーツに使われている McKibben 型人工筋肉の仕組みは下記の通り。
ゴムチューブを筒状のナイロンメッシュで包んで両端をかしめた構造で、ゴムチューブ内部へ圧縮空気を注入することによるゴムチューブの径方向への膨張が、外側を包むナイロンメッシュがあることによって、長さ方向へ収縮、強い引っ張り力に変換される。軽量かつ簡易な構造で、柔らかく、水中でも動作し、収縮する(最大でも全長の30%程度)だけなので安全に使えることが大きな特長だ。
実は今から30年余り前、「ラバチュエータ」という製品名で McKibben 型人工筋肉がロボット用に販売されていたことがある。しかしヒステリシス(=履歴現象、履歴効果。加える力を最初の状態のときと同じに戻しても、状態が完全には戻らないこと)が生じ、空気を入れる場合と抜く場合に同じ圧力をかけても、縮む量が変わってしまうため、産業用ロボットに求められる精密な制御には不向きというデメリットがあった。
一方で、人工筋肉にはモーターなど他のアクチュエータにはないメリットも多い。

「このチューブは約120グラム、卵2個分程度の重さで、5気圧の圧縮空気を入れると最大250㎏引っ張ることができます。モーターのように水に濡れてしまうと漏電する危険性もないし、防爆性(可燃性のガス・蒸気・粉塵による火災や爆発を防止する性質)もある。充電する必要もなくコストや安全性でも優れています。柔らかくて軽いし、人を動かすものなら、2,3ミリ程度のズレはそこまで大きな問題ではありません。使うならこれだなと最初から考えていました」(小林氏)
技術には限界がある。
改良を重ねる上ではユーザーとの
相互理解が不可欠だった
「一般的な機械を作るのと、人が着ける機械を作る最大の違いは、使う人間に文句を言われること」と小林氏は笑う。
開発当初から、実際にユーザーに試してもらって吸い上げた意見をリストアップし、お互い合意の上で改良を重ねてきたが、重さやコストなど共通するリクエストもあるなかで、使う人の体型、着け心地、感じ方にはやはり個人差があり、どう最適化していくかがエンジニアリングの腕の見せ所だ。
「うんと力が強い方がいいだろうと思って作ってみたら、実際はそこまで大きな力を求めているわけではないことも分かりました。今まで世になかったものを作るわけだから、こちらが良かれと思って付けた機能にユーザーが満足するとは限らない。比較のしようがないから、出してみてやっていくしかない」と、トライアル&エラーを重ねてきた。
「『これを着ければスーパーマンみたいになれるんでしょ』と誤解されることもあって、最初はそのギャップに苦労しました。でも技術には限界があって、万能ではないから、『これはできなくても仕方がないよね』と理解してもらえたのは、製品を使ってくれるエンドユーザーや企業と密に組んで進めてきたから」と、作り手とユーザー間のリスペクトを重視してきたことにも言及している。

「とにかくいろんな人が使ってもらえるようにしないと発展しない。今はその落としどころが少し見えてきたところ」
現在は作業支援がメインだが、「マッスルスーツ」がアプローチできる範囲はまだまだ広がりそうだ。技術だけではなく、相手への理解度や想像力も含めて、誰もが自立できる社会の実現に期待したい。
小林宏(こばやし・ひろし)
東京理科大学 工学部機械工学科教授。株式会社イノフィス創業者。1966年8月29日生まれ。東京理科大学博士課程修了、博士(工学)。1996年、日本学術振興会海外特別研究員としてチューリッヒ大学に派遣されたのち、1998年、東京理科大学工学部第一部機械工学科で講師、1999年同助教授、2008年同教授(現在)。
イノフィス(https://innophys.jp/)