“IoT製品が生み出す新しい豊かさ” を求めてコネクテッド・ハードウェアの企画・開発を行っている株式会社Cerevo(セレボ)。同社がラスベガスで開催された電子機器の見本市、CES(コンシューマー・エレクトロニクス・ショー) 2019に合わせて発表したのは、スキー板に取り付けるセンサーモジュール「XON SKI-1」と、四輪レース用のデータ表示・配信機器「XON ZECH-1」だ。ともに躍動感のあるスポーツの世界を、ヴィジュアル化する画期的なプロダクトだが、発売前にも関わらず、いま多方面から大きな注目が集まっている。その魅力に迫る。
スポーツのダイナミズムを
可視化するという試み

2018年には創業から10年の節目を迎えた株式会社Cerevoが、スポーツ用品ブランド「XON(エックスオン)」の新たな製品を発表した。そのひとつが、スマホやクラウドとの連帯機能を備えたスキー専用センサーモジュール「SKI-1」だ。
このプロダクトは、スマホ等のデバイスと連携することで、重心や負荷のかけ方といった滑りの状態を、グラフィカルに可視化してくれる。それにより、スキーのテクニックを合理的に向上させることができる。
しかもSKI-1は、GPSとLTEモジュールを内蔵しているため、万一、高価なスキー板を雪山で紛失してしまっても、スマホで位置情報を簡単に確認することが可能だ。
2015年に発売されたスノーボード用のセンサーモジュール「SNOW-1」も大きな話題となったが、その機能を踏襲したSKI-1は、いま最も旬なセンサーモジュールと言えそうだ。
さらに「XON」に加わった製品はもうひとつ、自動車レースの様子を走行データ付きで動画配信するためのデバイス「XON ZECH-1」である。

このXON ZECH-1をレース車両に搭載すれば、速度やエンジン回転数はもちろん、アクセル踏込量などの細かな情報を取得し、映像に重ねて表示することができる。
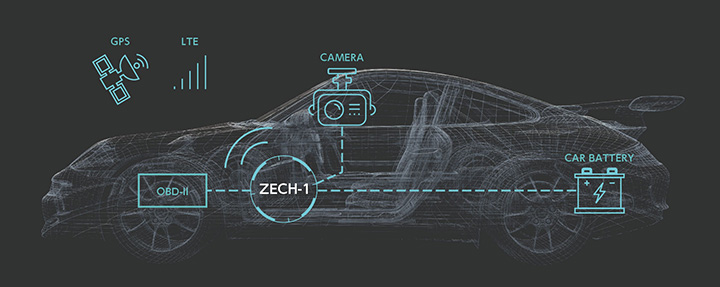
リアルタイムの可視化情報をYouTubeなどでライブ配信できるというのは、非常に興味深い。さらにピットにいるチームのメンバーも、いまどこを走っているのか? 残燃料はどのくらいか? といったことが共有できるため、レースの戦略を組み立てる際のツールにもなる。
「SKI-1」は2019年後半のスキーシーズン、「XON ZECH-1」は、2019年夏頃の発売予定。ともにCerevoならではのユニークな着眼点と確かな技術が結集した、独自性の高いプロダクトだ。
「XON SKI-1」画像引用元・参考:
https://xon.cerevo.com/ja/ski-1/
「XON ZECH-1」画像引用元・参考:
https://xon.cerevo.com/ja/zech-1/
「XON ZECH-1」動画引用元:
https://youtu.be/TYz47sDLCTM