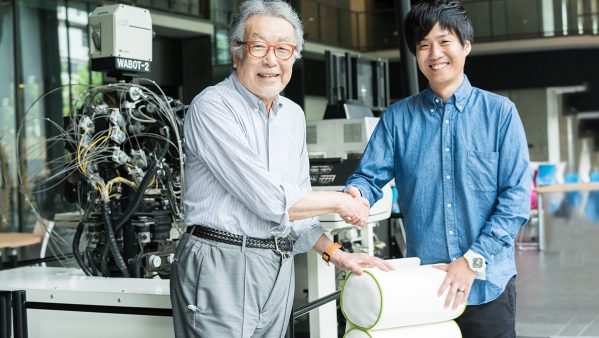
今でこそ、実験のデータをパンフレットで紹介し、これを売りにするメーカーも珍しくないが、こうしたエビデンスに基づいた寝具の研究がはじまったのはどうやら、最近のことのようだ。日本の寝具業界で、いち早く睡眠科学と寝具の結びつきに目をつけた京都の老舗寝具メーカーIWATA社長の岩田有史(いわた ありちか)氏と編集長・杉原行里(すぎはら あんり)の対談後編では、睡眠科学から生まれた寝具、そして、これからのオーダーメードについて語ってもらった。

杉原:前回は主に、睡眠科学と寝具のリンク、良質な睡眠を得るために必要なことなどをお伺いしました。その基礎知識をふまえて、具体的なIWATAさんの商品開発について、お話を伺っていきたいと思うのですが。
岩田:質の高い睡眠には、寝床環境が大切だということをご紹介しましたが、では、その寝床環境を整えるのに最も適している素材は何かと探りましたところ、天然素材に優るものはないというのが結論として出ました。
杉原:天然素材、それはどのようなものでしょうか?
岩田:化学的につくられたものではなく、自然に存在するものです。夏に使うのは日本よりも暑いところで育った麻がいいですし、冬は、日本よりも寒い地域で生きているラクダなどです。これらをふんだんに使ってできたのが、当社が今販売している麻のパットや、ラークオールなどです。適材適所とでもいいましょうか、合った素材を使うことが一番快適な寝具をつくる近道だと分かりました。
日本ではその昔、畳がマットレスとしての役割を果たしていました。畳は蓆をつみ重ねて閉じたものでしたが、聖武天皇が使っていたベッドではヒノキの簀子状のものの上にこうした積層構造の畳を敷いていたことが分かっています。この積層構造を現代版に置きかえて、一番いい素材で作ってみようということでできたのがラークオールです。
杉原:なるほど。
岩田:ラークオールのマットレスの場合は繊維が細いものほど上に重ねていて、ぐっと圧縮して入れています。体から圧力が少ないところは細いものでよく、お尻みたいな部分は馬のような太い繊維でしっかり支える構造を作り出しています。

新宿のショールームには構造を見える化した展示がされている。
杉原:すごいですけど、これは作るのが大変そうですね。
岩田:うちは創業188年目なのですが、130年くらいは綿だけだった。そこに、羽毛という素材を持ち込み、今度はラクダというものを持ち込んだのですが、掛布団は、綿よりも羽毛の方が軽くて暖かくて使いやすいことに私の祖父が気づいていて、それを父が商品として実現化しました。敷布団で綿を超えるものを探していたのですが、ずっと出会わなかった。化繊の開発もありましたが、保温性や吸水性など、ピンポイントでいいものはありましたが、オールマイティーに優れたものというのはなかった。たまたま、1990年代、百貨店の方がモンゴルからいろいろな繊維をもってこられて、その説明をする場面に出くわしまして、IWATAさんで何か使えないかと言われたのです。当時、父と一緒に拝見したのですが、ラクダの毛というのは羊毛と違い、顕微鏡で見た時にスケールと呼ばれる角がないのです。角というのは、例えば、髪の毛を顕微鏡で見た時にキューティクルが整っているとツンツンしたものが出ておらず、滑らかに見えますが、これと同じで、表面に角がない。羊毛は角があるため、繊維が絡まって毛玉になりやすいのですが、ラクダの毛はそれがない。柔らかさがありつつ、もんでも毛玉になりにくい。面白い素材かもしれないと思いました。分析してみると、保温性はもちろんなのですが、乾くスピードが速いことも分かりました。
杉原:早く乾かないとラクダだって風邪をひいてしまいますよね、きっと。(笑)
岩田:そうなんです。だから、オールシーズンいけるのではないかと思いました。
羽毛で得たゴミをきちんと取る技術を活用して、ラクダの毛も同技術の駆使によって品質のよい製品を生み出すことを目指していました。ラクダの毛を製綿する機械の開発から入り、それを包む生地の開発に進みますが、綿ができても生地ができなくて、1年ほどキャメル毛のために作った綿の機械は遊んだままのような状態の時もありました。
杉原:岩田社長はどこか、パズルを組み合わせていくような感じですね。いろいろなパーツを組み上げていく理系的とでもいうのでしょうか。岩田さんのあくなき探究ですね。綿から羽毛へとバトンが渡され、今度はラクダと繋がれてきましたが、その次はなんだと思われますか。
岩田:これからはRDSさんがされているような計測が必要な時代になるかもしれないですね。

杉原:計測は面白いです。今、東京2020パラリンピックで優勝をめざしている車いすマラソンの伊藤智也選手の車いす開発に取り組んでいますが、車いすで走行している時の体の動きが計測できる機械を作り、そこから導き出された数値を彼のレース用車いすの開発に活かす方法を取り入れたところ、記録が伸びる可能性がでてきました。
岩田:ほう、それは素晴らしいですね。
杉原:僕はこれから、個人所有が注目される時代がくると思っています。特に福祉用具の部分でそれを感じています。伊藤選手をはじめとするアスリートの方々の車椅子開発から分かってきたことは、本当にその人の体に合った器具を使えば、もっと快適に日常を過ごせるということです。松葉づえにしても、車いすにしても、今の市場はレンタルが主流のビジネスモデルです。でも、福祉器具が必要な人は、一過性のケガや病気の人だけではない。生涯的に器具が必要という人もいるわけです。パーソナライズという視点で見た時に、計測を基にした寝具のパーソナライズというのは出てくると思われますか?
岩田:難しいところで、今一番信頼性のおけるものとしては、脳波を計測することだとされているのです。例えば、大脳が脳波の上では深い眠りについていたとなっていても、本人の感覚と一致しないことがあるのです。こうなると、計測でいい数値の方が快適な寝具の正解なのかというと、そうとは言い切れない。数値化か、感覚か、どちらがQOLを上げるのかは難しい問題です。
杉原:脳は解明されていない部分が多いですよね。
岩田:多分、一般の人は「脳波的によく眠れていますよ」と聞いても、実際の感覚と乖離していれば、満足はしないとも思うのです。
杉原:計測など、データを基にしたという部分では、最近は体圧分散を謳う寝具も増えていますが、こちらはどう思われますか。
岩田:姿勢と体圧分散は結構注目されるのですが、寝具で考えた場合、体と接している部分の温度と湿度をどうコントロールするかが、やはり一番大切なことだと考えます。体圧も面白い着眼ではありますが、これだけで寝床環境が良くなるかという点に私は疑問を持っています。
杉原:人間は自然と減圧をしていて、例えば、座った姿勢が長くなった時に、無意識のうちに少し体を動かしていることがありますが、あれは減圧するために体が動いているという説もありますよね。
岩田:なるほど。そのお話でいくと、興味があるのは車いすユーザーの方など、体に障がいをもった方はどのようにして寝返りを打つのかということです。人類進化ベッドを作った時に気付いたのですが、人類進化ベッドは腕が動くだけで、本体が心地よく揺れるため、もしかしたら、障がいをお持ちの方がスムーズに体位を変えられるのではないかと。
杉原:試してみてもいいですか?
岩田:ぜひどうぞ。


「人類進化ベッド」は世界で最も権威のある工業デザイン団体IDSAが主催するデザインコンテスト「IDEA」2018年のファイナリストにも選ばれた
杉原:これは確かに、腕を動かすだけで心地よい揺れがきますね。ゆりかごみたいです。
岩田:はい、構造を見ていただくと分かる通り、程よく揺れるようにしています。張り具合もお好みで調節できますから、ある意味、カスタマイズでしょうか。
杉原:寝心地も最高にいいですね。家に欲しいくらいです。確かに、障がい者の方に試していただくのは面白いかもしれません。
岩田:下半身が動かない方の寝返りの研究は、まだどこもやられていないことです。また、高齢者の方や、脳こうそくで半身不随になられる方など、どんな人も快適に寝られる寝具というものは今後、必要になると思います。
杉原:例えば、車いすユーザーの人に協力をお願いし、寝姿勢や寝返りを計測することができれば、そんな寝具の開発につながるデータが取れるかもしれませんよね。
岩田:計測は簡単にできるものなのですか?
杉原:解析には少し時間がかかりますが、計測だけならすぐにできると思いますから、是非やってみましょうか。バリアフリー寝具の開発、興味深いです。
岩田 有史 (いわた ありちか)
株式会社イワタ 代表取締役社長。睡眠環境、睡眠習慣のコンサルティング、眠りに関する教育研修、睡眠関連商品の開発、寝具の開発、睡眠環境アドバイザーの育成などを行っている。睡眠研究機関と産業を繋ぐ橋渡し役として活躍する。著書に「なぜ一流のひとはみな『眠り』にこだわるのか?(すばる舎)、「疲れないカラダを手に入れる快眠のコツ」(日本文芸社)、「眠れてますか?」(幻冬舎)など。