車いす陸上スプリンターの伊藤智也選手とタッグを組み、エクストリーム・スポーツのプロダクト開発に精通したエンジニアやデザイナーらと共に、「チーム伊藤」を結成したRDS社。今秋より、同社がスタートした伊藤選手のオーダーメード・マシン開発の軌跡を追う本連載も、今回ではや4回目。パラリンピックの北京大会で金メダル獲得、ロンドン大会で銀メダル獲得という栄光の記録を新たに塗り替えるべく、伊藤選手の復帰の舞台となる「東京2020」に向けて加速するマシン開発の裏側を紹介する。
“感覚の数値化”から生まれた、
試作の数々
 前回のミーティングでは、伊藤選手の既存のマシンを基に、“しなり”を含むマシンの動きや、走行中の伊藤選手のフォーム、力の分散バランスなどの力学的なデータを、3Dスキャナーやモーションキャプチャ、フォースプレートなどの機器を使って計測した。それから1ヶ月、RDS社の先行開発部は、それらのモーションデータを元に、「感覚を数値化」するべく、多角的な解析作業を行い、3パターンのハンドリム(駆動輪)と、2種類のグローブの試作を開発した。
前回のミーティングでは、伊藤選手の既存のマシンを基に、“しなり”を含むマシンの動きや、走行中の伊藤選手のフォーム、力の分散バランスなどの力学的なデータを、3Dスキャナーやモーションキャプチャ、フォースプレートなどの機器を使って計測した。それから1ヶ月、RDS社の先行開発部は、それらのモーションデータを元に、「感覚を数値化」するべく、多角的な解析作業を行い、3パターンのハンドリム(駆動輪)と、2種類のグローブの試作を開発した。
ハンドリムとグローブは、いわば、車いす陸上用マシンの要。グローブでハンドリムを力強く“蹴る”ことで、マシンは走行し、加速していく。第3回目となる研究開発ミーティングでは、グローブがハンドリムに接地する角度や位置、接地面積など、緻密な調整を凝らした試作の実装実験が行われた。
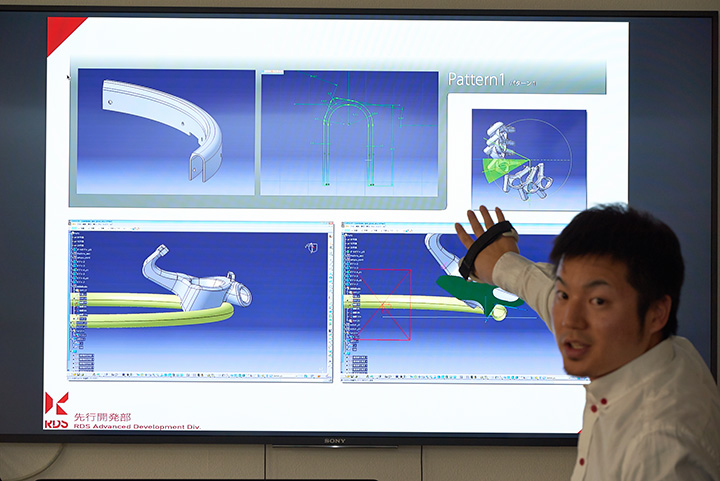 感覚の数値化を伊藤選手や開発チームのメンバーと共有するために、RDS社先行開発部の岡部卓磨氏から、データ解析とハンドリムの試作の経緯についての説明が行われた。
感覚の数値化を伊藤選手や開発チームのメンバーと共有するために、RDS社先行開発部の岡部卓磨氏から、データ解析とハンドリムの試作の経緯についての説明が行われた。
「先月のテストで得られたデータをCAD上に落とし込み、二次元で可視化していきました。グローブがハンドリムに接触を開始する時と、リリースする手前とで、伊藤選手の親指の角度に変位が見られたので、ハンドリムの断面形状をその2箇所と中間点から抽出し、パターン1~3の試作開発に活かしてみました」
ハンドリムの試作は、中央が山なりになったもの、内側、あるいは外側にやや傾斜したもの、と異なる形状に仕上がっている。実装実験では、これらの違いと、グローブとの関係性が、駆動力にどのような変化を与えるのかを検証していく。
20年のアスリート人生の結晶と、
最先端テクノロジーの確かな融合
 試作の一つを試すと、「このグローブ、相当エエんとちゃうかな。(ハンドリムに当てながら)、キャッチングの良さが全然違う」と伊藤選手。これまで伊藤選手は、自作のプラスチック樹脂製のグローブを使っていた。使えば使うほど、傷みも生じる消耗品ゆえ、新しいグローブが必要となれば、その都度、高温の樹脂を手にかけて型をとるという荒削りな方法で作ってきた。だが、自分の体のことを誰よりもよく知っている本人が作ったものだけに、グリップ部分は、吸い付くように伊藤選手の手によく馴染んでいる。開発チームは、この形状を活かそうと、既存のグローブを3Dスキャンにかけ、「親指を入れるパーツの上部面を5度上げたい」という伊藤選手からの要望を取り入れた試作を開発した。
試作の一つを試すと、「このグローブ、相当エエんとちゃうかな。(ハンドリムに当てながら)、キャッチングの良さが全然違う」と伊藤選手。これまで伊藤選手は、自作のプラスチック樹脂製のグローブを使っていた。使えば使うほど、傷みも生じる消耗品ゆえ、新しいグローブが必要となれば、その都度、高温の樹脂を手にかけて型をとるという荒削りな方法で作ってきた。だが、自分の体のことを誰よりもよく知っている本人が作ったものだけに、グリップ部分は、吸い付くように伊藤選手の手によく馴染んでいる。開発チームは、この形状を活かそうと、既存のグローブを3Dスキャンにかけ、「親指を入れるパーツの上部面を5度上げたい」という伊藤選手からの要望を取り入れた試作を開発した。

手前がハネナイト。奥がハーネス。
さらに、ゴム素材にもこだわった。耐久性に優れ、かつ馴染みの良いゴムとして、伊藤選手が愛用してきたハーネス(Harness)の間に、衝撃吸収性の高い“ハネナイト”という名のゴムをクッションとして挟んだ。ハーネスのゴムシートの上で、ソケットレンチを垂直に落とすと、ポーンと軽く跳ね上がる一方、「ドスッ!」と音を立てて沈むほど、ハネナイトには、強力な衝撃吸収力がある。
「エキスパートとのマシンの開発って、本当に面白いですね。このグローブ一つにしても、僕の20余年の結晶と今の最先端テクノロジーが確実に融合しているので。本当に、ジャストフィットです」と満足げな様子の伊藤選手。
「フィーリングは、
めちゃくちゃエエ感じ」
 「僕たちのミッションは、伊藤選手のこぎ方に合ったものを極限まで最適化していくことです。なので、伊藤選手、いつも通りにこいでください。それでは、始めましょう」と話すのは、開発の指揮を執る同社クリエイティブ・ディレクターで、HERO X編集長を務める杉原行里(すぎはら・あんり)。
「僕たちのミッションは、伊藤選手のこぎ方に合ったものを極限まで最適化していくことです。なので、伊藤選手、いつも通りにこいでください。それでは、始めましょう」と話すのは、開発の指揮を執る同社クリエイティブ・ディレクターで、HERO X編集長を務める杉原行里(すぎはら・あんり)。
 今回も、伊藤選手の感覚を数値化するために、モーションキャプチャでデータを計測しながら、実装実験は進められた。
今回も、伊藤選手の感覚を数値化するために、モーションキャプチャでデータを計測しながら、実装実験は進められた。
「(こいでいる時の)フィーリングは、めちゃくちゃエエ感じです。“入り”と“抜け”の感覚が異常に良い。ただ、右が滑ります。左はそんなに滑ってないかな。おそらく材質の問題だと思います。それ以外は、めちゃくちゃこぎやすいです」
伊藤選手の言う入りとは、グローブがハンドリムに接触し始める時で、抜けとは、グローブをハンドリムからリリースする時のこと。インターバルを挟みながら、繰り返しこいでみたが、やはり滑るようだ。
 「ペーパーで削って、バーナーで炙ると良くなるかもしれません」と、ハンドリムを自ら調整し始めた伊藤選手。今回の試作に使われているのは、自転車タイヤのゴム。炙ると、新しいゴム特有のぬめっと滑る感触は改善された。
「ペーパーで削って、バーナーで炙ると良くなるかもしれません」と、ハンドリムを自ら調整し始めた伊藤選手。今回の試作に使われているのは、自転車タイヤのゴム。炙ると、新しいゴム特有のぬめっと滑る感触は改善された。
その後も、実装実験は続けられた。グローブには、親指を入れる面と、人差し指と中指を入れる面の二つがあるが、後者でハンドリムを回そうとすると、滑ってしまい、全力でこぐことができないという状況が続いた。ハンドリムに使用したゴム素材とグローブ形状の相性が思わしくなかったことが原因である。

スローモーションの映像で、ハンドリムとグローブの接地具合を確認中の岡部氏(左)。
「断面が山型になっているパターン1のハンドリムに関しては、グローブインパクト時(グローブがハンドリムに接触する瞬間)、スムーズにこぐ動作へ移行できるという良いフィーリングを伊藤選手に感じてもらうことができました。ハンドリムという回転するパーツをさらに加速回転させるためには、いかに抵抗なく、減速させずに力を入れていくか。これが、キモになってきます。本来の目標であるハンドリムの駆動力向上データの取得は叶いませんでしたが、その一方、新たな試作を作る上で大切な要素の確証を得られたことは、大きな収穫です」と先行開発部の岡部氏は、実装実験の結果について話す。
この日、テスト終了後に行った3Dスキャンデータを基に、開発チームは、パターン1のハンドリムの本仕様の設計と、グローブに使うゴムを含める素材について再検討を進めている。果たして、心置きなく全力疾走できるマシンが、次回はお目見えするか?引き続き、「伊藤モデル」の開発過程を追っていく。
vol.1 獲るぞ金メダル!東京2020で戦うための究極のマシン開発に密着
vol.2 選手と開発者をつなぐ“感覚の数値化”
vol.3 100分の1秒を左右する“陸上選手のためのグローブ”とは?
伊藤智也(Tomoya ITO)
1963年、三重県鈴鹿市生まれ。若干19歳で、人材派遣会社を設立。従業員200名を抱える経営者として活躍していたが、1998年に多発性硬化症を発症。翌年より、車いす陸上競技をはじめ、2005年プロの車いすランナーに転向。北京パラリンピックで金メダル、ロンドンパラリンピックで銀メダルを獲得し、車いす陸上選手として、不動の地位を確立。ロンドンパラリンピックで引退を表明するも、2017年8月、スポーツメディア「HERO X」上で、東京2020で復帰することを初めて発表した。