東京2020パラリンピック車いす陸上で、メダルが有望視されていた伊藤智也選手(バイエル薬品)が、大会直前のクラス分け審査で今までよりも障がいの軽いT53クラスに振り分けられることが分かった。これにより、最もメダルに近いとされていたT52男子400メートルへの出場が絶望的となった。25日に開かれた記者会見に登壇した伊藤選手は「ハイレベルなショック」と話し「(車いすレーサーを)共同開発してきたRDSチームに対して、最高の場所で(レーサーを)デビューさせることができなかったことを申し訳なく思っている」と、悔しさをにじませた。
パラリンピックは障がいの度合いに応じてクラス分けがされる。伊藤選手が出場を予定していたT52は、指の曲げ伸ばしに制限があり、自力で座位を保つことができないというのが一つの基準だ。IPCからの審査スコアの公表がまだされていないため、どの部分で今までよりも軽い障がいクラスに認定されたのか正式な発表はこれからだが、伊藤選手は、自力で座位を保つことに必要とされる「体幹機能が残っていると判断されたのではないか」と話す。伊藤選手は多発性硬化症という進行性の病気を抱えており、昨年11月には大きな再発もあった。本人は身体機能の回復は全く感じていないという。
「競技クラスだけが軽くなって、体(の状態)は重いまま」(伊藤選手)
会見に同席した日本パラ陸上競技連盟強化委員長の指宿立監督は、これまでの審査(2019年ドバイ世界パラ陸上など)や、エビデンスの結果を見ても「体幹機能が残っているという結果はない」と話し、今回のクラス分け審査について「日本チームとしては納得していることではない」と、記者団に対し強く伝えた。
パラ競技のクラス分けの
「公平性」はどこにあるのか
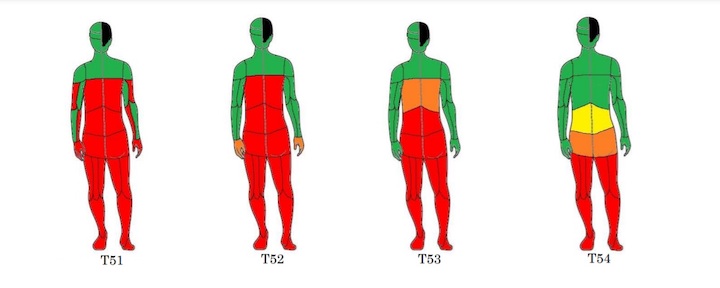
T52は肩関節、肘関節、手関節の機能は、正常もしくはほぼ正常である。指の曲げ伸ばしに制限がある。 自力で座位バランスを保つことが出来ない。(C7/8 頚髄損傷レベル)。
T53は両上肢の機能は、正常もしくはほぼ正常である。 腹筋と下部背筋の機能がなく、自力で座位を保つことが出来ない(T1~T7 脊髄損傷レベル)。(一般社団法人 日本パラ陸上競技連盟 「分かりやすいクラス分け」より)
パラ陸上競技のクラス分けは、①身体機能評価、②技術評価、③競技観察という三つから確定する。今回の伊藤選手のクラス変更の結果は、このうちの①と②の結果として通知されたもの。現在は③の競技観察という項目がまだ残っている状態だ。競技観察については、当初申請していたクラスで様子を見るという認定方法もあるのだが、認定を行う審査員にあたる「国際クラシファイヤー」は今回、変更後のT53男子400メートルでの観察を指定してきた。伊藤選手によれば、車いす陸上にとって、障がいの度合いクラスが一つ下がることは、高校生と小学生が戦うほどの違いがあるという。伊藤選手は手を動かすことが難しいという障害も残っているが、T53となれば、腕や手の機能は正常という選手たちと同じ土俵で戦わなくてはならなくなる。
これまでの実績考慮されず
伊藤選手はこれまで、2008年の北京パラリンピックでT52クラス男子400メートルと、800メートルで金メダルを獲得、引退を表明したロンドンパラリンピックでは銀に終わったものの、2016年にパラリンピック再挑戦を宣言、トレーニングに励んできた。東京2020パラリンピックに先駆けて行われた2019年のドバイ世界パラ陸上ではT52クラスで400メートル銀メダルを獲得していたが、この大会を含め、過去の大会でクラス変更の判定をされたことは一度もなかった。
指宿監督は「(これまでの)データやエビデンスを見ても、T53に変更になるようなデータは見られない」と話す。
選手ファーストの審査を考えるならば、競技観察はこれまで実績のあるT52クラス400メートルで行うことが妥当と思われるが、今回、「国際クラシファイヤー」は、初挑戦となるT53クラスでの競技観察を指定、変更となったT53の最初の種目となる男子400メートルで、クラス分けの最終決定が行われることになった。
しかし、金メダルに期待のかかるT52クラス400メートルの予選は、競技観察レースとなるT53クラス400メートルよりも前に試合が終わる。競技観察でクラス判定が覆り、再びT52と認められても、すでにレースは終わっているため、現段階で“400メートル金メダル”の夢は失われたことになる。
「(T52クラス)400メートルを目標にトレーニングをしてきたので、非常に無念です」(伊藤選手)
50代で現役復帰を宣言し、このパラリンピックを目指してトレーニングを積み重ねてきた伊藤選手。会見では、長年、伊藤選手の取材を続けてきた記者が、涙混じりに質問する姿も見られた。
「まだ、パラリンピックも終わっていない」
持ち前の前向きな姿を見せようとする伊藤選手は「これまで、沢山の方々に支えられてきた。(その人たちと)一冊の本をつくってきたのだとすれば、たかだか1ページ、イレギュラーがあったということだけ。まだパラリンピックも終わっていません。ならば、勇気を持って、つぎのページをめくりにゆく姿勢が自分には必要なのかと」と、出場が決まったクラスについて、とにかく全力で挑む姿勢を見せた。
「結果また、自分にとって嬉しくないページがくるのかもわかりませんが、その時に、自分一人で背負いきることができなければ、チームのみんなに一緒に背負ってもらって、一緒に泣こうかなと思っています」(伊藤選手)
伊藤選手が登場するのは29日(日)11時25分~行われる車いす陸上T53男子400メートル予選だ。競技観察で審査が覆り、元のT52となれば、その後に開かれるT52男子1500メートルと、100メートルに出場することもできる。まずは、29日の行方を見守りたい。