目次
先端ロボット工学技術を駆使した人型重機が闊歩し、社会課題を鮮やかに解決する世界。株式会社人機一体の金岡博士は、そんな未来を目指し日々研究を続けている。前回の本誌編集長・杉原との対談(http://hero-x.jp/article/4026/)から3年。あれから、我々の日常はすっかり様変わりしてしまった。人機一体にはどのような変化が起きているのか?
「あまねく世界からフィジカルな苦役を無用とする」
先端ロボット工学技術が全くと言っていいほど社会で活用されていないという現状を打破すべく、人機一体が目指す目標のひとつに「先端ロボット工学技術の社会実装」がある。しかし、少し考えるとシンプルな疑問が浮かぶ。工場などで活用される産業用ロボットでは社会実装にはならないのか? ということ。ここには「力を操る技術」という、大きな壁が存在していると金岡博士は話す。
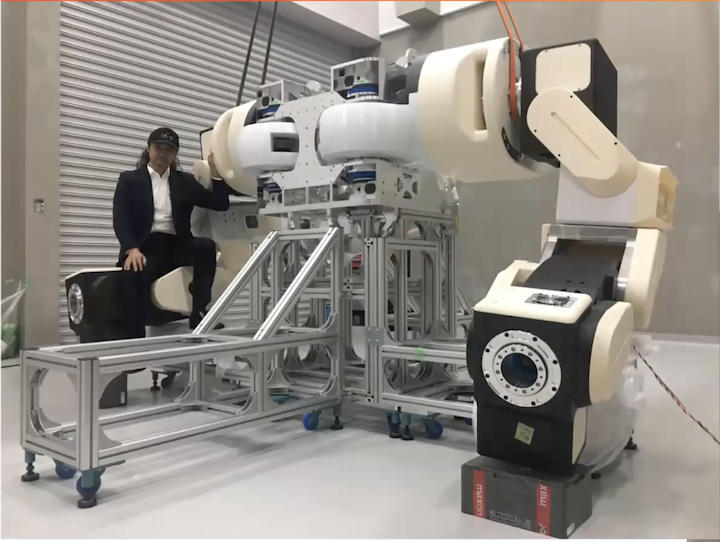
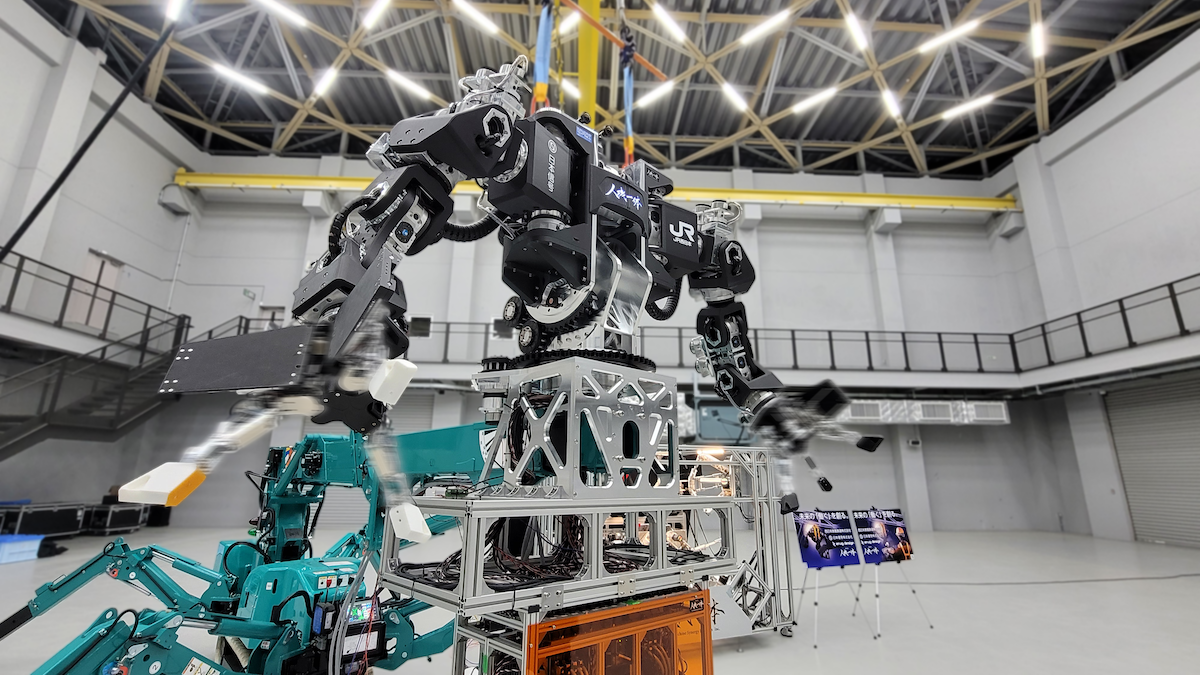
金岡博士と零一式人機 ver.1.0(人型重機の上半身試作機)
「高性能な力・トルク制御(※1)が容易にできる『力を操る技術』が、人機一体が考える社会実装には必要です。世の中で既存のロボットが上手く活躍できていないのは『力を自在に操れない』ということが大きな原因。ロボットが力を操ることは皆さんが想像するより難しい。今のロボットは、限定された動きであればある程度、力を操ることはできるのですが、これは人機一体が求める『力を操る』レベルには全く達していません」
(※1)トルクとは回転力のことで、トルク制御とは、モータの発生トルクがトルク指令値入力と一致するように、モータを制御すること。モータの電流と発生トルクはほぼ比例するため、一般にはモータの電流を制御することによってトルクを制御する
金岡博士が考える「力を操る」制御には、単純に一方通行で決められた力を出すだけではなく、予測できない外部からの力に対して適切に反応するということも含まれている。そこで、日常生活の中にある単純な動き、ドアの開閉で考えてみるとしよう。
ドアを開けるという作業はまず、ドアノブを持つ、次にドアノブを回す、そして蝶番を軸にドアを開くという三つの動作から構成されている。ご存知のようにこれは、力をコントロールできる人間にとって、何も考えずに行える造作もない作業だ。
しかしこの作業を産業用ロボットで行おうとするとそう簡単ではない。まずドアのサイズや蝶番位置、それからドアノブの形や動き方を事前に何らかの形で計測する必要がある。ドアノブを正確に掴み、回転軸を中心に正確に回す、それから蝶番を中心とする円弧に沿って動かすといったように、動きを一つひとつ分解し、一連の動きをロボットに落とし込まなくてはいけない。それがちょっとでもずれてしまうと、ドアを壊してしまうことにもなりかねない。これが今の産業用ロボットの限界であり、金岡博士がいう「力を操る」技術によって克服すべき壁ということになる。
大きな力から小さな力までを自在に操るロボットは現在、実用レベルでは存在していないという。それを唯一実現できるのが人機一体が持つテクノロジーであり、未知の環境に対応させる本当の意味での社会実装という目標に大きく関わってくるというわけだ。
圧倒的なインパクトで独自性と技術力を示す
“人機プラットフォーム”
この3年間で人機一体が最も大きく変わった点は「知識製造業」としてのビジネスのスタートだ。人機一体が持つ「力を操る」先端ロボット工学技術を、新しい産業を作るための体系化された知識、すなわち知的財産として世界に提供する。そしてそれを可能とするビジネスモデルの構築こそが、ロボットの社会実装に必要不可欠であるという判断からの方向転換だ。
「現在、人機一体は主幹事企業として、知的財産をマネタイズするビジネスモデルでありコンソーシアムでもある『人機プラットフォーム』を構築し運用しています。まず既にPoC(概念実証)が終わった人機一体の知的財産を、既存のロボット工学技術では解決できない『苦役』の類の課題を持っている『ユーザー企業』に対して提案します。ただしこの提案は、知的財産そのままではなく課題を解決する社会実装コンセプト、ソリューションとして為されます。つまり『このような形で人機一体の知的財産を活用すれば、貴社の課題を解決することができます』という提案です。これは、ベンチャービジネスの文脈ではPSF(問題解決に最適な方法)に相当します。
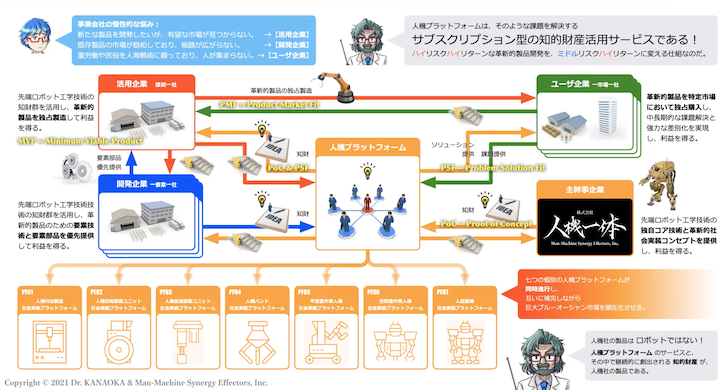
人機プラットフォーム概要(※2
そのフィット(PSF)が実現したら、人機プラットフォームは『活用企業』すなわちメーカーにお声がけをします。PoC済の人機一体の知的財産ポートフォリオと、ユーザー企業とのPSF済の社会実装コンセプトをセットにして、革新的技術の製品化におけるリスクを低減する。我々には革新的で有用な知的財産、活用企業にはメーカーとしての膨大なリソース、ユーザー企業には解決すべき喫緊の課題がある。ロボット分野であれば、この組み合わせは上手く行きます。なぜなら、不思議なくらい先端ロボット工学技術が活用されておらず、広大なフロンティア、ブルーオーシャン市場が広がっているからです。至る所で人が未だに苦役に従事していることがその証拠です」
もともと活用企業が持つメーカーとしてのリソース(人、知識、技術、生産設備、営業、販路等)を用いながら、さらに人機一体の革新的な知的財産を活用することで先端ロボット工学技術を社会実装できたら、活用企業は新規事業の開発費を削減して低リスクで革新的製品を開発でき、ユーザー企業は低コストで自社の課題を解決でき、さらに製造業としてのリソースを持たない人機一体にとっても、知的財産を活用した製品を世に出すことができる。
先端ロボット工学技術が社会課題に対して有用である限り、活用企業、ユーザー企業、人機一体のすべてにメリットしかないのが、人機プラットフォームなのである。互いがWin-Winの関係を構築できるのであれば、共通の目標である社会実装に向けスピード化を図ることができるというわけだ。
JR西日本との出会いで加速した
社会実装への道
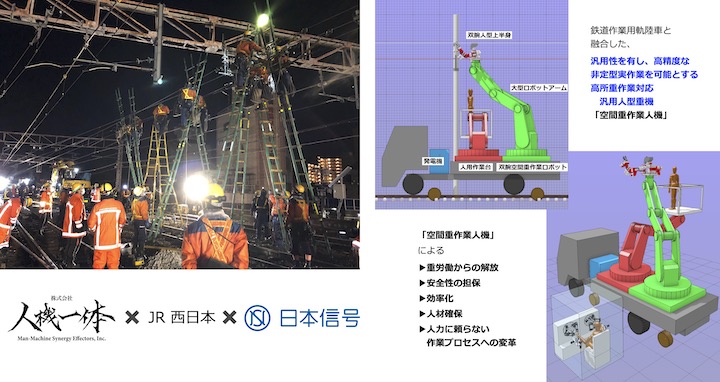
では実際に、人機一体が持つこれらの知的財産はどのように使われるのだろうか。人機プラットフォームで初めてのユーザー企業として名乗りを上げたJR西日本を例に説明しよう。JR西日本が参加する「空間重作業人機社会実装プラットフォーム」(以下、空間重作業人機PF)では、深夜に行われる鉄道架線のメンテナンスに人機一体の先端ロボット工学技術を活用した高所重作業対応汎用人型重機「空間重作業人機」を社会実装して課題解決することを目標に、昨年からプロジェクトが進行している。現状、高所重作業を熟練作業者が行っているが、このような深夜の高所重作業が10年後にも果たして成り立つかどうかが、JR西日本の持つ課題であった。
「今はまだ、誰かがこの作業をやらなければならない。これが先程お話した『解決しなければならない課題』の一つです。ユーザー企業のJR西日本は、鉄道の安全運行に対する強い使命感と責任感を持つ一方で、強い危機感もお持ちでした。それに対して、先端ロボット工学技術を駆使しつつ、実現可能なソリューションを技術単体としてではなくビジネスとして提案するのが人機プラットフォームのやるべきこと、すなわち仕事となるわけです。
今回、人型上半身ロボットを大型のロボットアームの先端に装着し、空間を飛び回れるような感覚でロボットが自在に作業できる社会実装コンセプトを提案しました。このロボットを操作する人間はもちろん地上にいますが、まるで上空にいるロボットになったかのような感覚で作業ができるのです。もちろんこのロボットは大きな力も出せますし、緻密な作業も可能。人間が登るよりも作業効率も上がり、労働災害のリスクを排除でき、安全が確保されるというメリットもあります。もっと言えば、人間は安全で快適な環境からロボットを操作ができ、重労働から解放されるのです」
環境の整った離れた場所から人型重機を操縦できるということは、肉体の実質的な強さや弱さが意味をなさなくなってくることにも繋がると感じた。
そして人機プラットフォームとして次に重要となるのが、これを製品として販売する活用企業の存在。今回のプロジェクトでは、まさにベストフィットとも言うべき、鉄道・道路分野の信号トップメーカーである日本信号社と手を組み、製品化に向けて既に話を進めている段階に来ているという。さらに金岡博士はこう語る。
「人機プラットフォームの一つの特徴として、先端ロボット工学技術の汎用性の活用があります。単一機能ではなく、汎用であってこそロボットの価値がある。先の空間重作業人機PFでは、JR西日本をユーザー企業として『空間重作業人機』を開発していますが、特定のニーズに過剰に最適化するようなロボットではなく、汎用性を維持するように常に留意されています。
大企業とベンチャー企業の一般的なオープンイノベーションでは、多くの場合、大企業のニーズを満たしてしまえばそれで成功です。今回も空間重作業人機PFの重要なマイルストーンですが、過剰にフィットすることなく汎用性を維持しています。そうすることによって用途を拡大し、『空間重作業人機のベストプラクティス』をJR西日本で開発することができます。さらにJR西日本からJRグループ各社、もっといえば、私鉄や全世界の鉄道会社にも横展開ができるわけです。世界中の鉄道会社が同じ課題を抱えていますから、汎用性を維持できれば当然、広範な横展開ができないはずはありません。
鉄道という枠にさえ縛られる必要もありません。空間重作業人機のロボットとしての汎用性は道路インフラメンテナンスなど、高所作業車が使われるあらゆる場面で活用することができます。鉄道分野で開発した汎用ロボット部分はそのままに、ベースと手先のアタッチメントだけ変更すれば、すぐに多用途で使えるようになり、業種を超えた汎用高所作業ロボットという潜在市場を顕在化させることが可能です。
空間重作業人機は、昨年度はじめの段階ではCGの構想図だけでしたが、今は福島ロボットテストフィールドで開発した試作機があります。人機一体で開発したこの技術を、活用企業(メーカー)としての日本信号と人機一体が、これから数年で製品として完成させます」

零式人機 ver.1.0(高所重作業対応汎用人型重機PoC試作機)
巨大なブルーオーシャン市場を顕在化させる意味
前回の取材からたった3年で「人機プラットフォーム」という独自のビジネスモデルを構想し、実際に大企業と連携してビジネスモデルを具現化したことにはさすがと言わざるを得ない。しかしあくまでもこれは、空間重作業人機PF一つだけの話である。人機プラットフォームとしては現在、全7個のプラットフォームが構想されており、残り6個の人機プラットフォームの実装(※2画像:最下部のオレンジ部参照)が待たれる。
金岡博士によると、人機プラットフォーム内の比較的強固な連携だけではなく、人機プラットフォーム間での「緩い」連携も当初から構想されており、人機プラットフォームがこれらを繋ぎ合わせることで、プラットフォームの枠を超えて先端ロボット工学技術によって紡がれる新たな産業と、そのためのサプライチェーンを同時に構築することになる。そこから生まれる相互作用は無限大とも言えるのではなかろうか。知的財産の独占から共有へとパラダイムシフトしたことで、その視界は明らかに大きく開けたのだ。
「DX(デジタルトランスフォーメーション)は社会を変革するでしょう。しかし、それだけでは苦役はなくならない。DXはRX、すなわちロボティクストランスフォーメーションと対、ベターハーフです。両輪が揃ってこそ効果は最大になります。RXなしに我々の明るい未来はなく、人機一体の技術なしにRXはありません」。金岡博士が放った印象的な言葉が現実となる日は近いであろう。
金岡博士
博士(工学)。発明家、起業家、時に武道も嗜む。専門はパワー増幅ロボット、歩行ロボット、飛行ロボット等。ロボット研究開発の傍ら、辛口のロボット技術論を吼えることがある。マンマシンシナジーエフェクタ(人間機械相乗効果器)という概念を独自に提唱し、あまり相手にされないながら二十年来一貫してその実装技術を研究・蓄積してきた。2015年に株式会社人機一体を立ち上げ、ビジネスとしての先端ロボット工学技術の社会実装に挑む。
関連記事を読む





































