IoT、AI、自動運転技術などテクノロジーによって、まだまだ留まることを知らないモビリティの躍進。セグウェイの冠商品である立ち乗り二輪車の生産が間もなく終了となるが、同商品の台頭は、“夢の乗り物” として後発のブランドやプロダクトにも大きな影響を与え続けている。また、今や当たり前のように存在する、カワサキ、ヤマハ、ホンダといった国内メーカーも製造する水上オートバイは、モータースポーツとして発展し、エンターテインメントや個人所有の動きを受け、モビリティの中でもかなり身近なものとなった。 このようにモビリティは、生活をより豊かに、便利にする存在であるが、もちろんそれだけではない。日々進化するモビリティは、テクノロジーの躍進によって社会課題の解決や改善をもたらすという役割を担っているのだ。 今回【Mobility Watchers】で紹介する「空飛ぶ車」は、夢を感じさせてくれるだけでなく、中国で長年課題となっている都市交通へのアプローチも叶えてくれそうだ。
世界販売台数の3分の1を占めるほどに、中国国内に大きな市場を誇るフォルクスワーゲン。グループ全体が2028年までに目指すBEV(バッテリー式電気自動車)の生産台数2200万台の半数以上をフォルクスワーゲン グループ チャイナが生産するのを目指すほか、電動化攻勢の加速に向けた充電インフラに向けた新しい合弁事業も立ち上げ予定など、e-モビリティ戦略においても中国の活躍は欠かすことができない。
しかし、高度経済成長に伴う自動車の需要拡大の裏には、交通渋滞や駐車場不足から来る停車難、排気ガスによる大気汚染といった深刻な課題も山積みだ。
同社は一般の人々から車のアイデアを募る企画「THE PEOPLE’S CAR PROJECT」を開催し、四川省・成都出身のWang Jia氏による「空飛ぶ車」を採用した後、それをCGで再現。Wang氏の両親が車に試乗するというユーモラスなムービーが完成した。
丸っこくタイヤもない車体は、まるでアミューズメント施設のアトラクションのよう。フロント部分にはおなじみフォルクスワーゲンのロゴが配されている。
Wang氏が発案したのは、地下に豊富な鉱物資源を有する成都の地理的特徴を活かし、鉱物の磁力に反応して車が宙に浮かぶというマグレブカーだ。ガソリンを燃料としないため世界のなかでも深刻な大気汚染の改善の一助ともなり得る。
都市交通で活躍する「空飛ぶ車」はもちろん、自動運転もお手のもの。周囲で走行する車と一定の距離を保ち、理想の速度を即時で計算、危険を検知したら自動で停止するなど、安全対策もばっちりだ。
Wang氏の受賞記念として作られたムービーはフィクションだが、遊び心に溢れ、そう遠くない未来に実現してしまうのでは?と思わされるものがある。
わが国日本でも、交通渋滞の緩和、生活物資の運搬、離島や山間部での新たな移動手段や、災害時等を含めた急患の搬送などに活用が期待されるとして、「空」で活躍するモビリティについて、経済産業省と国土交通省が合同で技術開発や航空法関連の法整備等、協議が進められているようだ。福島・東京・愛知・三重・大阪といった意欲的な自治体が社会実装に向けて手を挙げ、2023年を目標とし事業がスタートされると見込んでいる。思ったより、かなり近い未来だ。
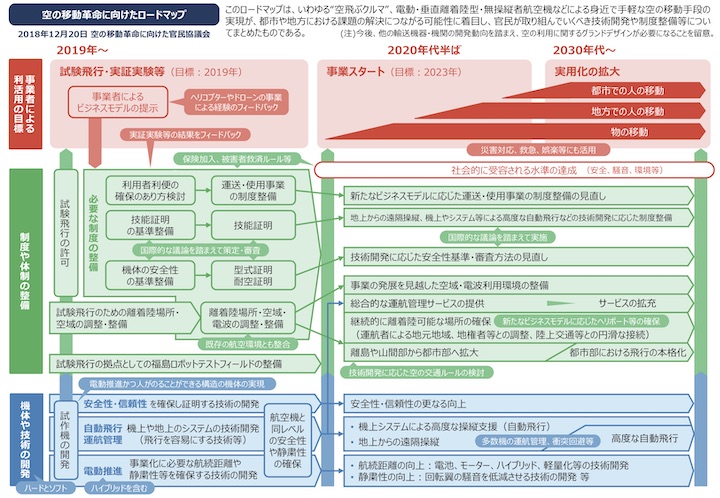
参考資料:経済産業省「空の移動革命に向けた官民協議会」より
日本を含め、果たして「空飛ぶ車」の実現はできるのか…?
こんなモビリティがあったらいいなでとどまることなく、社会課題解決の糸口として現実になる道のりを追い続けたい。
【Mobility Watchers】前回記事はこちら:http://hero-x.jp/movie/9339/