世界中で熱狂的なファンをもつ、3次元CADソフト「SOLIDWORKS」。そのユーザーたちが集う祭典『3DEXPERIENCE World 2020』が、2020年2月9~12日におこなわれた。会場となったのは、テネシー州ナッシュビルにあるミュージック・シティ・センター。基調講演には開場前から多くのファンが並び、ドアがオープンすると駆け足で椅子を取り合うほどの熱気。そこには、プロダクトデザインや設計という枠を越え、製造~販売に至るまで、ものづくりの未来を変える景色があった。
3Dデータなら完成前に
「SOLIDWORKS」は、ミドルレンジの3次元CADソフトブランドであり、以前紹介したダッソー・システムズ(http://hero-x.jp/article/7301/ )の傘下にある。同カンファレンスは、約20年に渡り『SOLIDWORKS World』と名付けられていたが、今年から『3DEXPERIENCE World 2020』という名称に変更。3Dエクスペリエンスとは、3Dによる新しい体験のことだ。
つまり、プロダクトデザインを最初から3Dで設計してしまえば、耐久性などの検証作業、各種コラボレーション、製造、生産管理、マーケティング、販売に至るまで、プラットフォームを通じてあらゆる部署との連携がスムーズに行えるというもの。
製品が完成する前にヴァーチャルの世界で各種検証ができるので、いまや試作品を作らずにいっきに生産へと進むケースも増えている。また、3Dの設計データがあれば3Dプリントするのも容易など、あらゆる面で効率化が図れるのだ。
そのほか、完成品と瓜ふたつの3Dデータを用いてVRで疑似体験したり、商品撮影をせずにCMやカタログを作れてしまうというようなメリットもある。ひとことで言えば、3Dデータを軸として、バリューチェーン全体をループ上につないでしまおうという試みなのだ。
世界各国から これは製造業のみならず、3Dテクノロジーを活用しているデザイナー、エンジニア、メイカーズ、起業家、学生、各界のビジネス・リーダーたちにとって大きな影響を与えている。その証拠に、会場内には同社製品を使っているさまざまな立場のユーザーが約6,000人集結した。
基調講演では、ソフトの新しい機能や新製品の発表はもちろん、このサービスを使っている各界のイノベーターたちも登壇。HERO-Xと親和性が高い人物としては、TEAM POSITIVEの鈴木隆太氏(http://hero-x.jp/article/6015/ )(http://hero-x.jp/article/7211/ )も愛用している義肢メーカー、BioDaptの創設者であるマイク・シュルツ氏(http://hero-x.jp/movie/4203/ )もそのひとり。
マイク・シュルツ(Bio Dapt社の創設者兼アスリート)
BioDaptのVF2は、 2008年に足を切断した彼は、その4ヶ月後に自らの設計でモトクロス向けの義足を制作。7ヶ月後にはモトクロスの大会に出場し銀メダルを獲得している。その後も、パラリンピックのスノーボードクロスで金、バンクスラロームで銀、さらにはX-ゲームスで10回も金メダルを獲得するほどのアスリートである。
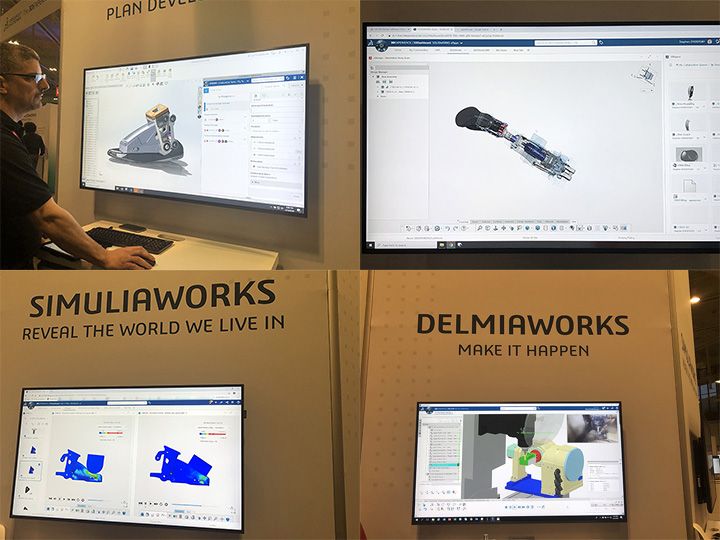
当初は自分のために義足を作っていたが、それが人の役にも立つとわかり2010年にBioDapt社を設立。アクティブスポーツを中心に、世界中のさまざまなアスリートから支持を集めている。現在、同社では3Dエクスペリエンスプラットフォームを使い、お客さんからの要望をリスト化。それをもとに変更後の全体シミュレーション、デザイン変更、耐久性に関する各種検証、生産工程のシミュレーションに至るまで、すべての管理を「SOLIDWORKS」のプラットフォームで行なっている。これにより、効率的に義足のパーソナライズ化を進めているのだ。
3Dデータを使ったBioDapt社の制作工程がわかる展示スペース
そして、マイク・シュルツ氏と同じ壇上に上がったのは、MITでバイオメカトロニクス(生物の構造や運動を力学的に探求し、応用する学問)を研究している マット・カーニー氏。彼は、脳や神経回路とマシーンをつなげることで、考えるだけで義手や義足が動き、手や足の「感覚」までも取り戻せる「バイオニック義肢」を開発した人物だ。彼もまた「SOLIDWORKS」のユーザーである。
マット・カーニー(バイオメカトロニクスの研究者)
そのほか、腕にターボジェットエンジンを装着して飛ぶジェットスーツのデザイナー、サム・ロジャー氏も登壇。試行錯誤しながら、時速約80kmという世界最高記録を打ち出すに至った経緯を説明した。
VIDEO
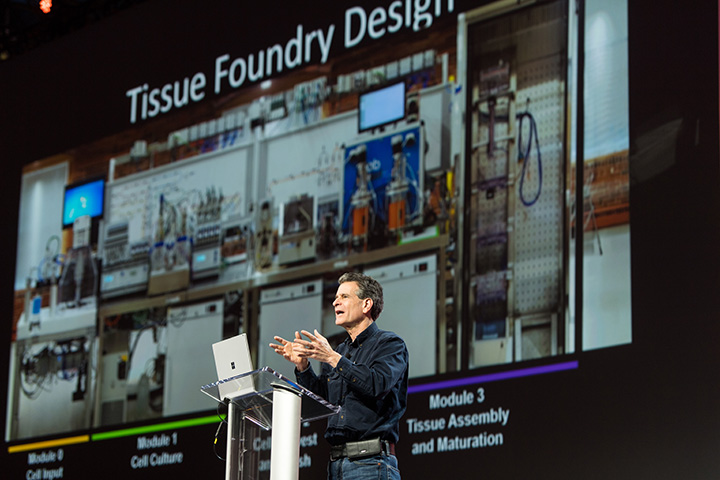
また、糖尿病患者にとって救いとなった携帯型インスリンポンプの開発や、段差を上り下りできジャイロセンサも搭載した電動車椅子『iBot』の開発。それを発展させた『セグウェイ』や、FedExの自動運転配達ロボ。最新の開発では、自宅で人工透析ができるマシーンなど、天才発明家でありエンジニアのディーン・ケイメン氏も登壇。30年に渡る開発の歴史や、彼が注力している学生ロボット競技会『FIRST』の活動が紹介された。
ディーン・ケイメン(発明家兼エンジニア)
『3DEXPERIENCE World 2020』に登壇したすべてのイノベーターの共通していたのは、自らの夢や願望の実現、さらには社会問題の解決にSOLIDWORKSを使っているという点。また、同社が進めるプラットフォーム化により、同じ問題意識をもった人々とのコラボレーションが活性化しているという点も大きい。
SOLIDWORKSのCEOであるジャン・パオロ・バッシ氏も、「イノベーションはコラボレーションから生まれる」と語る。プラットフォーム化のメリットは製造業のみならず、戦地で負傷した人々への義手や義足の支援、障害をもった子供たちに無償で車椅子のコスチュームを提供するマジックホイールチェアの試みなど、世界の知恵を集結して問題解決に当たる際にこそ有効だといえる。
ジャン・パオロ・バッシ(SOLIDWORKS CEO)
「今年のカンファレンスでは、“難しい問題の解決にあたって、夢を見るように新しい方法を模索しよう” という点をコンセプトにした」という、ジャン・パオロ・バッシ氏。さまざまなスキルを持った人たちが協力し合いながら、コミュニティ単位でものづくりをスムーズにおこなう未来。それはすでに大きなうねりとなっている。