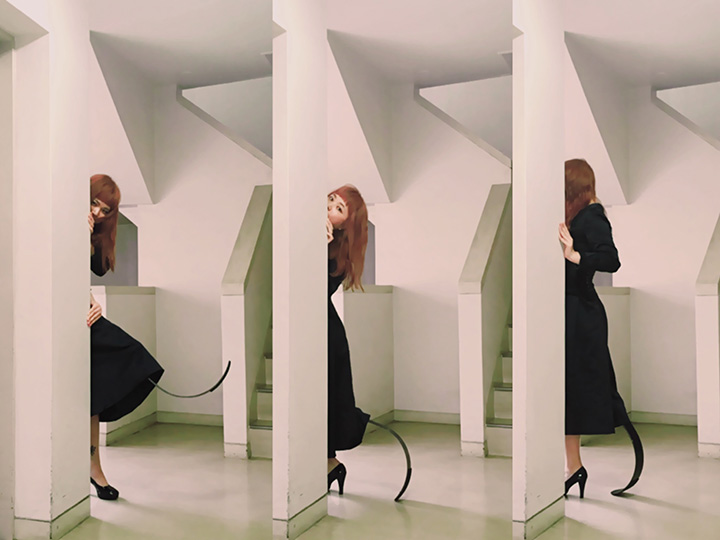
剥き出しにした義足をいくつも履きこなし、被写体となって著名フォトグラファーやミュージシャンのミュージックビデオに登場するGIMICO。そのビジュアルは実にインパクトがあり、斬新で刺激的。2016年リオパラリンピック閉会式の東京2020プレゼンテーションでは、ゲームやアニメなどのポップカルチャーが国を特徴づけるこの日本で、彼女の存在は際立っていた。ミステリアスな印象のGIMICOだが、果たしてどんな人物なのか?
「自分は素材。新しい価値観に気づく
きっかけになれればいい。」
プロフィール情報も少なく、自身が経営しているブラジリアンワックスの所在地も非公開と、謎の多い義足モデルGIMICOだが、実際会ってみると、驚くほど気さくで話しやすい。ニコニコと常に笑顔というわけではないが、初対面なのに久しぶりに会った遠縁のような距離感で接してくれた。そんな彼女が初めて義足を履いたのは14歳のころ。中学生の女の子なのだから、その後の生活や、自分の周りの世界はさぞ変わったのだろうと勝手に想像してしまったのだが。

©藪田修身
「人生の歴史的に14歳ってまだ真っ白ですよね。真っ白なところに出来事が起きたというだけで、義足がきっかけで人生が変わったということはありません。それまでの人生にガラリと変わるほどのことがなかったわけだし、その後の人生の方が濃いのが当たり前。義務教育だから、みんなと同じ時間に同じ行動をするというのも良いリハビリになりましたね。」
そう淡々と話すGIMICOがモデルになったのは、「素材になりたい」と思ったからであるという。自分自身をプロダクトとして客観視し、セルフプロデュース能力が高いかもしれない、と自己分析する彼女は、発想を転換し、義足であるビジュアルを生かしてアンダーグラウンドな世界でデビューした。そして、リオパラリンピック閉会式では、東京2020を象徴するアイコンとして、表舞台で世界に圧倒的な存在感を見せつけた。モデルをはじめ、表現を生業にしている人間なら誰もが夢みる大ステージに立ったことにおいて、本人は
「あの場には私が適任だった、ハマっていたのだと思う。ただそれだけです。」とコメントする。あくまでも自分が何かをアピールするというスタンスではない。
「人があまりやっていないことをやってみたり、できるだけオーディエンスが見たことがないことをすることで新しい価値観に気づいてもらえたらいい。こういう世界もあるということを、他人の価値観を尊重することで自分を肯定できることもあると思う。」

©藪田修身
義足モデルが望むのは、
使い捨てできるシリコンライナー
「義足モデル」なだけあり、撮影などで実に様々な義足を履いているGIMICOだが、彼女にとって理想の義足とはどのようなものだろうか。
「生活用の義足に関してはアップデートされているけど、20〜30年変わっていないという印象です。テレビで紹介されるような最新の義足はとても高額で、一般障がい者が使える義足とはズレがあります。例えば足と義足をつなぐシリコンライナーという、いわば靴下みたいなものがあるのですが、一年に一度しか補助金を申請できず、自腹で買うと10万くらいかかるんです。なのでそういった消耗品を安価で毎日使い捨てできるように開発し直してほしいですね。私は運動量が多いというのもありますが、一年に一度の交換では衛生上問題があります。あとは汚れや水に強い義足が欲しい。義足向きなもっと万能な素材があればいいなと思います。生活用の義足は多種多様、ニーズも様々でどこに焦点を置くか定めにくいというのもありますが、これだけ色々なことが発展している世の中において、アナログすぎるところがある現状です。」
これは義足を日常的に履いている人にしかわからない意見だ。改善すべきポイントを知るためにはユーザーの意見に耳を傾けること。それはどんなアイテムにおいても同じである。殊に毎日体の一部として使っている義足なのだから、より快適に過ごせるよう早急に開発が進むことを願う。

©藪田修身
日常生活において「運動量が多い」というGIMICOだが、実は障がい者スポーツの大会に出場経験があり、金メダルを獲得したこともある。
「東京2020に向けてスポーツの機運が高まっていくならば、障がい者ももっと気軽に運動できる機会が増えればいいですよね。障がい者が運動するとなると、どうしても競技を目指されがち。私が上京して板バネを借りるときも、話の流れで義肢装具士の臼井二美男さんがやっている陸上チームに入り、ジャパンパラリンピックや色々な障がい者スポーツ大会に出場することになりました。私はタイムを競うような陸上競技に興味が持てなくて結局辞めてしまったけれど、健康上、適度な運動はしたいという気持ちはある。けれど、例えばヨガや簡単なエクササイズがやりたくてネットで検索しても、健常者の人のものしか出てこない。片足がない人はどこに重点を置いてどういうポーズをしたら体に効くんだろうとか、どこにも情報はないんです。軽くジョギングしたいけど、それ用には板バネは借りられないのか。競技まで本格的な運動でなくても、もっと手軽な値段でレンタルできて、スポーツができるようになれば。そういうチャンスがくればいいなと思っています。」
パラリンピックは、
サブカル好きにもハマる!?
義足モデルとブラジリアンワックス店の経営者。次に夢中になれる職業が “降りて” くるのを待っているというGIMICOだが、2018年が始まった今、彼女はすでに新しいポジションで、世の中をざわつかせ始めている。
「例えば、そこまでスポーツに興味が持てないけれど、どうせなら東京2020を少しは楽しみたい、という人にも興味を持ってもらえる可能性が、パラリンピックにはあると思っています。健常者のスポーツはもう確立されているけど、障がい者スポーツというのは、足のない人はどう調整しているのとか、目の見えない人はどういう感覚を持っているのかとか、それにプラスメカ的なものが合体して、近未来的なイメージがあるから、アニメとか漫画の世界にコネクトできる。そういった特徴がスポーツに関心の少ないサブカルチャー寄りの人たちの興味をそそるのでは、と直感しているんです。私はそのナビゲーター的な役割を担いたい。」
それまでは受け手に自由なイメージを持ってほしいと発言を控えていたが、リオパラリンピック以降はインタビューやトークショーといった仕事を積極的に受け、ラジオやニコニコ動画の番組にも出演したりと、“生GIMICO” を解禁。
「以前は素材として、ビジュアルで十分インパクトがあるので、そこにメッセージを乗せてしまうと強くなりすぎるし、場合によっては福祉的なメッセージのみに繋がっていってしまうのを避けて、一切発言していなかった。でもリオ以降は、私が何かを発信してもいいのかもしれないと思い始めたんです。」
年齢不詳でミステリアス。エッジィなビジュアルでありながら懐の深さ、母のような温かさを感じさせる人柄。東京2020とその先に、日本を代表するポップ・アイコンとしてGIMICOの姿を頻繁に見かける日が来るかもしれない。
GIMICO
中学2年生の時に骨肉腫のため右足大腿を切断、義足となる。2009年より義足モデルとして活動を開始。森美術館「医学と芸術展」で蜷川実花デザイン義足のモデルを務めたのを皮切りに、そのエッジの効いた存在で多くの作品に出演。浜崎あゆみ、DIR EN GREYのミュージックビデオや写真、映画、イベントやショーなど一つのジャンルに捉われることなく常に大胆に表現を続け、それらを通じて今までにない新しい価値観が生まれている。2016年にはリオパラリンピック閉会式にてフラッグハンドオーバーセレモニーに出演し世界中から注目の的に。NTTdocomo、ワコール、アディダス、NTTdocomoなど大手企業のCMにも大抜擢をされ2020年へ繋ぐ時代のニューアイコンとしてその活躍がますます期待されている。