2016年に複合材料業界の国際見本市JECにて、INNOVATION AWARDを受賞した二足歩行アシスト装置C-FREX(シーフレックス)や、デザイン性の高いシンプルな対向3指の電動義手Finch(フィンチ)など、国内外から注目を集める数多くのリハビリテーション装置を手掛けてきた河島則天氏。そのアツいスピリッツも含め、リハビリ業界で河島氏の功績やシステム作りを讃える人は少なくない。頻繁に連絡を取り合っているというHERO X編集長・杉原が、改めてそんな先駆者のモノづくり哲学を伺った。業界を牽引してきた河島氏が思い描くこれからのヴィジョンとは?
自分に足りないものを探して
『リハビリテーション・エンジニアリング』を学んだ
杉原:今までしっかりお聞きしたことがなかったのですが、河島さんは一度海外に留学されていますが、その理由はなんだったのでしょう。やっぱりリハビリの道に進むためですか?
河島:ここ(国立リハビリテーションセンター)に来る前に、カナダのトロントにいましたが、それは研究のためです。研究のフィールドに進む人の多くは、いったん国外に出て、進んだ研究をやっているラボに留学するのが一般的なんですよ。リハビリに関しては、日本も進んでいる部分はありますが、北米は、文化とか制度などの違いによって幾分環境が異なります。なので、そんな状況に身を置いて、自分のキャリアのプラスになるようなことを探したいと思ったんです。家族を連れて行くつもりでしたから、トロントは治安がいいというのも大きな理由のひとつではありますけど。

これまで多くのリハビリテーション装置を手がけてきた河島氏。「患者さんがよくなることが何よりも一番」だと語る。
杉原:日本と海外の違いというのは、具体的にはどんなところですか?
河島:やっぱり法的な部分や文化が違うというのは大きいです。新しい成果を研究の段階で出したとしても、それを制度に反映させていくのは、日本ではなかなか難しい。新しいものをすぐに現場で使おうという風潮は、僕の印象では欧米のほうがずっと進んでいて、リハビリもそれに沿ったところがある。新しい成果が現場に活かされる時間的サイクルが早い場所に行くことは、とても意味があるなと思いましたね。
杉原:なるほど。それでカナダでは主に何を学んだんですか?
河島 僕がいたのは、トロントリハビリテーション研究所の工学系の研究室。もともと僕は大学も教育学部で文系なんですけど、リハビリの世界に入っていろいろとやっていくと、自分に足りない部分が見えてきて。そのひとつがエンジニアリングの素養だったんです。リハビリ工学のラボに良く知る先輩がいたこともあり、そこを選びました。
杉原:じゃあトロントに行って、これまで自分がやってきたものとは全然違うフィールドに進んだということですね。
河島:そうですね。カナダに行く前は、リハビリの研究だと思いっきり言えるものはほとんどやっていなかったですから。患者さんを対象としていたとはいえ、自分がやっていたのは論文を書くための基礎研究。そこからもっと人に役立つことをしようと考えると、モノづくりをしたりだとか、自分でシステム開発をしたりだとか、そういうことが必要だと思ったんです。
リハビリは断片的な知識と
アプローチでは解決に至らない
杉原:HERO Xがスタートして1年経過しましたが、実は、いろいろなところで河島さんのお名前をよく聞くんですよ(笑)。また河島さんの話が出てきたってなることが多くて(笑)。それだけ、様々な人に影響を与えたり惹きつけたりする理由ってなんだと思いますか?
河島:それは自分ではわかりません(笑)。もちろん、やってきたことが多くのフィールドに浸透してきたというのはありがたいことです。ただひとつ言えることは、自分が昔蒔いた種が今出てきているだけ、そう思っています。
杉原:なかなかリハビリの現場で本当に役立つものを、研究から実用まで到達させることは難しいですよね。
河島:リハビリの分野で、研究で成果を上げて、本当に実用化させるとか、そもそもの目的である患者さんに恩恵を与えられるレベルのものを作るとか、そこまでやりきっているものは実際のところあまりないと思います。モノづくりは、アイデアとそれを具体化いていくためのプロセスが必要です。リハビリは基礎の領域ではなくて、工学や理学、心理学や社会学だとか、学際的な領域なので、断片的なアプローチでは、解決できないと思うんです。そういうあらゆる分野が必要とされる世界でモノづくりをしようと思い立った自分の野心みたいなものが、もしかしたら他の人に波及してきているのかもしれません。
杉原:医工連携という言葉がありますが、河島さんはそれを地で行っていると思いますけど。
河島:別に医工連携をしようと思ってやっているわけではないですけどね。本来問題意識が明確な研究というのは、大きな研究資金を得るために大風呂敷を広げるというやり方ではなくて、当事者レベルで解決をしようとしているはずだし、それほどの大上段な研究開発でなくても解決できる可能性はあるはずなんです。だから、具体的に解決のゴールまで行くものまで作ろう、そう思ってモノづくりを始めたんです。研究の成果が、臨床現場に還元されずに留まってしまったり、掲げたビジョン通りの問題解決には至らず、終わってしまってはしょうがないですから。
自分たちは“かゆい所に手が届く”
プロダクト作りがやりたい
杉原:河島さんが手がけたもので、世の中で広く使われているものって結構ありますよね。
河島:実際に製品化しているのが、現時点で5つあります。義手のFinchや、高次脳機能障害の評価やリハビリのためのツールATTENTION(アテンション)、あとはBASYS(ベイシス)という立位姿勢時の重心の揺れを調整するプラットフォームだったり。どれも華々しさはないですけど。
杉原:BASYSというのは、どういうものなんですか?
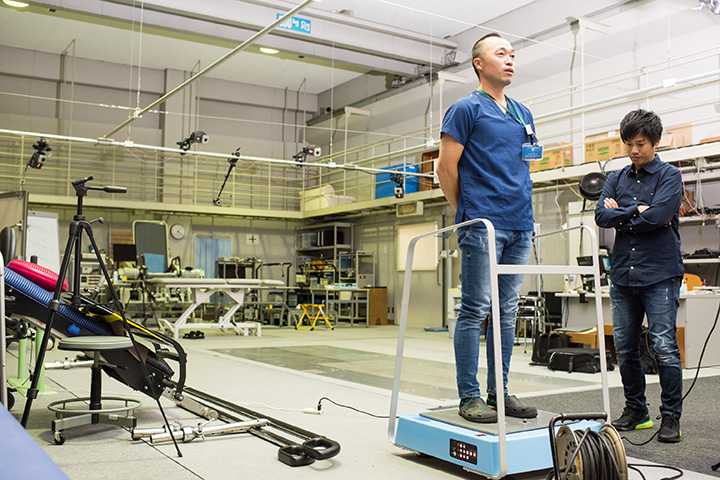

河島氏が京都のテック技販と開発したBASYS。立位姿勢時のバランス障がいを改善するのに役立つ。まさに画期的なプラットフォームだ。
河島:簡単に言ってしまえば姿勢調節を整える機器ですね。立っている時の揺れを測って、その揺れに応じたフィードバックを床面の動作として与えます。健常者でも揺れの大きい人だと普通に立っていても30mmぐらいは揺れていますが、姿勢調節が損なわれるともっとグラグラと揺れている人がいる。BASYSは、そういった自分では姿勢の調整が難しくなっている人には、免震することで揺れを抑える手助けをしたり、ある程度はバランスを保てていてもバランスの感度が悪い人には、本人にはわからないレベルで揺れを増幅させて適切な調節を促すこともできます。そうやって2種類のモードで症状に応じたリハビリができるシステムです。こういったリハビリを行うことで、姿勢の障がい、バランスの障がいが解決できる可能性があるんです。
杉原:これは、どこかとコラボして作ったんですか?
河島:テック技販さんという京都のメーカーと共同で作りました。センサーメーカーでそれまでリハビリのモノづくりは一切やっていませんでしたが、そこの技術だったらこういうものができるかもしれないと思って共同開発をお願いしたんです。商品化されたのが2015年で、半年後ぐらいに医療機器認可を取りました。
杉原:ほかには、河島さんが作ったもので、ここで体験できるものはありますか?
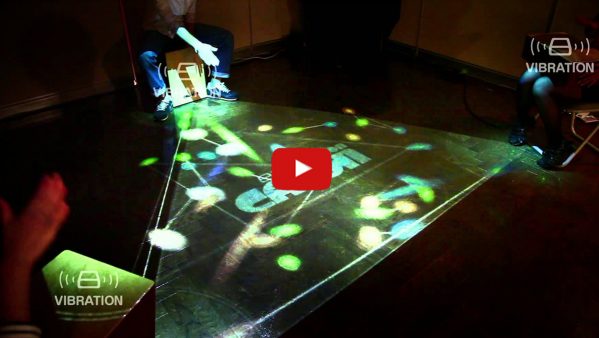
河島:感覚が麻痺した患者さんに、物体に接触したタイミングや素材の質感を与えてあげるというリハビリのシステムもあります。例えばベルクロのザラザラした質感やテープのキュキュっという感覚を、皮膚や骨を介して振動で伝えるものです。仮に脳卒中によって身体の半分が麻痺した場合でも、振動は骨を伝わって知覚できるので、麻痺側の肩のところに振動子を置いて使用したりします。
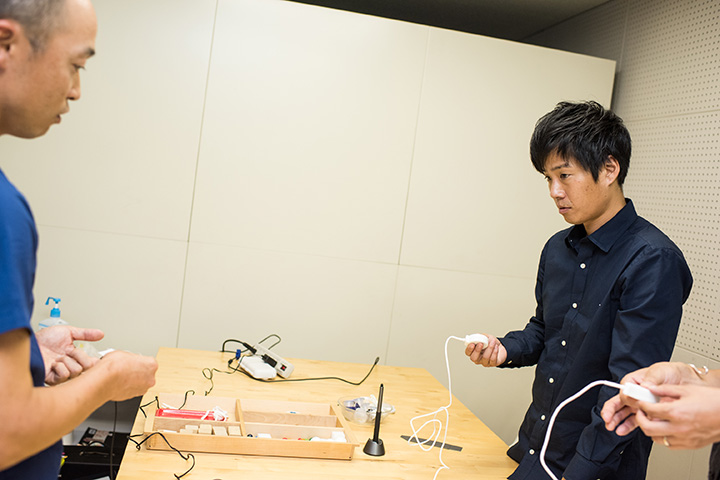
触ったものの材質や素材感を、皮膚や骨の振動を通して伝えるリハビリシステム。(名古屋工業大学の田中由浩さんとの共同開発)。
杉原:なるほど。こういった河島さんが手がけたものは、これまでリハビリのフィールドではなかったということですか。
河島:そうですね。BASYSにしても、振動装置にしても、一見して目新しいことはないですが、僕らがやっているのは、現場のセラピストの人たちに見せた時に、あぁなるほど、これは理に適っているよね、これだったらリハの現場で使えるよね、といってもらえるものを目指しているんです。あぁすごい! って驚かせるものじゃなくていい。
杉原:今ある技術を集めてオーバースペックにするのではなくて、必要最小限で形にしているんですね。
河島:簡単にいえば、“かゆい所に手が届く”ということをやりたいわけです。華やかに見えるもので、みんなが期待するものを作るのも新しいモノづくりではあるけれど、そうじゃなくて、リハビリの現場で本来は必要だけれども見過ごされているものとか、各々の技術を掛け合わせて、こういうものを作ったらどうか、ということを具現化しているんです。それぞれの分野で当たり前になっているものをアッセンブルするだけでもリハビリでは即戦力になる。
杉原:河島さんは、料理人みたいな感じということですね(笑)。新しい研究をすることは確かに大事だけど、その結果を統合したり、アレンジしたり、料理したりする人たちは少ないのかもしれません。
河島:本当の意味での臨床現場での問題意識を、ちゃんと形にすることが大事だと自分は思っています。実は突き詰めて考えると、必要とされていることは真新しいことなんかじゃなくて、ごくごく当たり前のことに行き着くことのほうが多いんですよ。
河島則天(かわしま・のりたか)
金沢大学大学院教育学研究科修士課程を修了後、2000年より国立リハビリテーションセンターを拠点に研究活動を開始。芝浦工業大学先端工学研究機構助手を経て、2005年に論文博士を取得後、カナダ・トロントリハビリテーション研究所へ留学。2007年に帰国後は国立リハにて研究活動を再開。計測自動制御学会学術奨励賞、バリアフリーシステム開発財団奨励賞のほか学会での受賞は多数。2014年よりC-FREXの開発に着手。他、対向3指の画期的な電動義手Finch 、立位姿勢調整装置BASYSをはじめ、様々なリハビリテーション装置の開発を手掛けている。