レディメイド(既製品)で対向配置の3指構造。それが電動義手“Finch(フィンチ)”の大きな特徴だ。日本の義手ユーザーの85%以上が装飾義手を使用している現状を考えれば、その構造もヴィジュアルも、メインストリームと逆行していると言わざるを得ない。とはいえ、無駄をそぎ落としたスタイリッシュなフォルムには、不快感ではなく好印象を抱く人も少なくないはずだ。しかも軽量で使いやすく、日常生活で求められる動きや負荷にもオールマイティに対応できると聞けば、大きな可能性を感じる。この興味深いプロダクトを生み出したキーマンの一人、大阪工業大学の吉川雅博准教授を訪ねた。
ソフトを研究しても
それを乗せるハードがなかった
 JR大阪駅から地下通路を10分ほど歩けば、地上に出ることなく大阪工業大学の梅田キャンパスに到着する。今年4月に完成したばかりの真新しいキャンパスは、地上21階建ての高層ビル。真横には梅田を象徴する巨大な観覧車がそびえ立つ都会の真ん中に、吉川雅博准教授の研究室はある。
JR大阪駅から地下通路を10分ほど歩けば、地上に出ることなく大阪工業大学の梅田キャンパスに到着する。今年4月に完成したばかりの真新しいキャンパスは、地上21階建ての高層ビル。真横には梅田を象徴する巨大な観覧車がそびえ立つ都会の真ん中に、吉川雅博准教授の研究室はある。
吉川氏は、今でこそロボティクスや福祉工学分野で多彩な研究を行っているが、もともとは心理学、行動科学、IT企業のマーケティングといったまったく別の分野に身を置いていた。ロボティクス分野に携わってからも、ハードではなくソフトの研究をしていたと語る。
「最初は義手の専用ソフトみたいなものを研究していたんです。腕につけた筋電センサーを機械学習させてあげると筋電だけで7動作できるようになるとか、そういうことを追求していました。ただ、いくらソフトを研究したところで、それを乗せるハードがないことに気がついたんです。実際にハードの開発を始めたのは2010年ごろ。もう必要に駆られてという感じでした」


吉川氏は研究室の奥のデスクでプロダクト開発を行うことが多い。乱雑に置かれた工具を巧みに使いながら、職人のようにリペアやメンテナンスもこなす。
もっと軽くて安くて
簡単に着けられる義手はないものか
日本で圧倒的に使用されているのがこちらのような装飾義手。リアルな見た目は魅力的だが、機能はほぼない。
現在の日本では、上肢の欠損者は約8万人、前腕欠損者は約1万人と推定されている。前腕欠損者が作業に使用できる義手は、大きく分けると「能動フック」と「筋電義手」の2種。とはいえ、前者は作業性に優れるが、フックの形状が心理的負担になる、後者は自然な操作性があっても非常に高価という難点を持ち合わせているため普及には至らず、多くの人は把持機能のない装飾義手を使用している。Finchは、それらの多くの問題点をクリアした画期的な提案でもある。
「そもそもは、“オーバースペックで重い義手ではない、もっと軽くて安くて簡単に着けられるものはないかな”という(国立障害者リハビリテーション研究所の)河島(則天)さんとの何気ない会話からスタートしました。実は河島さんがカナダに行った時に、マジックハンドのような子ども用の玩具を見て、“これはいい”とインスピレーションが沸いたそうです。そんなアイデアから互いに煮詰めていって、人と接する部分に使うサポーター作りのノウハウのあるダイヤ工業さんにも間に入っていただきながら、試作していきました」
機能を足すのではなく
引き算で作ったのがFinch

Finchは、そんないい意味での“お手軽”な発想が何よりもユニークだ。簡単に装着できるのはもちろん、とにかく軽い。2011年に開発がスタートしてから約1年で3Dプリンターを導入し、その開発スピードはさらに加速した。最終的には、ほぼすべての工程を研究室で作り、メンテナンスもできる状態が整ったという。
「いまFinchは、我々の研究室でほぼ100%設計しています。さらに仕上げまで研究室でやっているのですが、それはかなり珍しいケースです。通常は、あるところまで研究室で作って、あとは業者に仕上げてもらいますが、Finchは仕上げは疎かメンテナンスまで研究室で行っています。そこまでやらないと、関わっていただく企業のコスト負担を軽減できないという理由もあります」

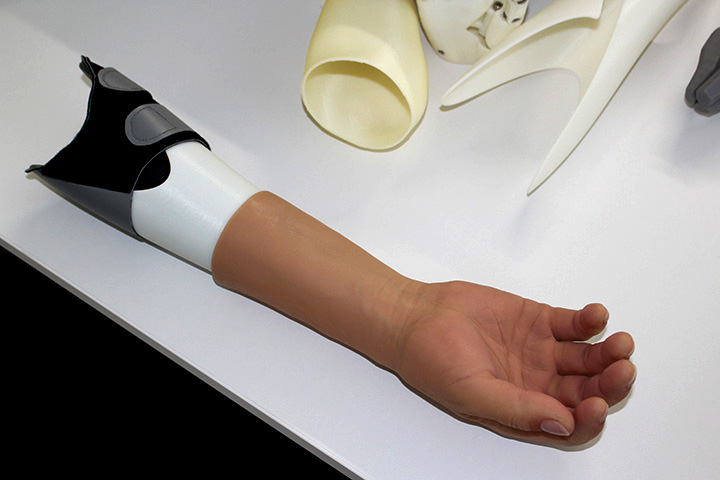
無駄を削ぎ落としたシャープなフォルムが印象的なFinch。ロボティクスの技術が活かされた対向3指構造は、これまでの義手のイメージを覆した。総重量330g、価格は15万円。
無駄を削ぎ落としたデザインは、見た目のシンプルさや美しさだけでなく、モノづくりにかかるコストを軽減している。それが買いやすい値段を生み、ユーザーの親近感へと繋がっている。便利でハイスペックな筋電義手にはない大きな魅力だ。
「何か機能を足すのではなく、どちらかといえば引き算で作ったのがFinchです。電動義手に必要な機能だけを残して、無駄を極力省いている。実は、企画段階から150万円の筋電義手の10分の1の値段にするという目標がありました。それを実現するためには、モーターもフィードバックのためのセンサーもたくさん使えませんが、試行錯誤を繰り返しながら少しずつハードルをクリアしていきました。ちなみに、表にネジが出ないように設計した見た目の格好良さもこだわりです(笑)」
吉川雅博(よしかわ・まさひろ)
大阪工業大学ロボティクス&デザイン工学部システムデザイン工学科准教授。北海道大学文学部で認知神経科学を学び、卒業後はIT企業に入社。企画・マーケティングに従事した後、筑波大学に再入学。産業技術研究所の研究員を経て、奈良先端科学技術大学院大学ロボティクス研究室の助教に就任。2016年4月より現職。専門は福祉工学。国立障害者リハビリテーションセンター研究所の河島則天氏とFinchを企画立案したのは2011年。東京大学生産技術研究所の山中俊治氏も開発に加わり、同プロダクトは、2016年の1月にはダイヤ工業より正式に販売を開始。同年、超モノづくり部品大賞にて健康・バイオ・医療機器部品賞を受賞。