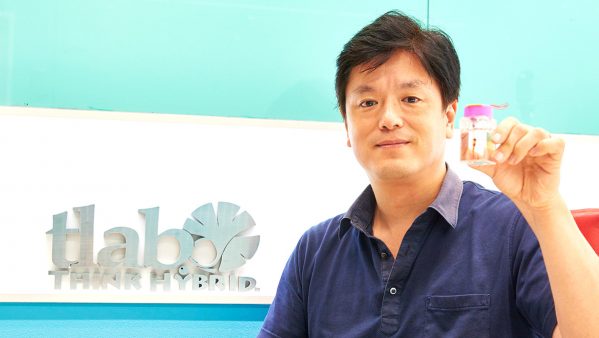
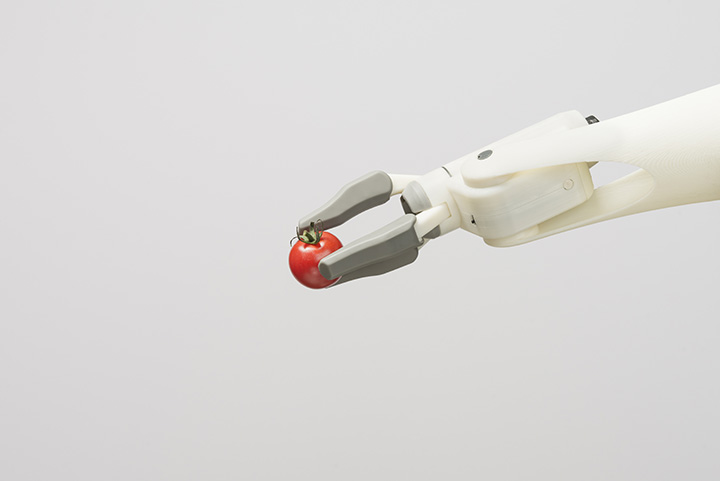
レディメイド(既製品)で対向配置の3指構造。それが電動義手“Finch(フィンチ)”の大きな特徴だ。日本の義手ユーザーの85%以上が装飾義手を使用している現状を考えれば、その構造もヴィジュアルも、メインストリームと逆行していると言わざるを得ない。とはいえ、無駄をそぎ落としたスタイリッシュなフォルムには、不快感ではなく好印象を抱く人も少なくないはずだ。しかも軽量で使いやすく、日常生活で求められる動きや負荷にもオールマイティに対応できると聞けば、大きな可能性を感じる。この興味深いプロダクトを生み出したキーマンの一人、大阪工業大学の吉川雅博准教授を訪ねた。
筋電義手は高価で試す機会もない
義手というと通常は、一人一人の腕の形に合ったものを義肢装具士が作るオーダーメイドをイメージするが、Finchはレディメイド(既製品)。まるで洋服のように5パターンのサイズのなかから自分の腕の周径に合ったものを選び、すぐに装着できる。これは、義手を積極的に使ってみようというモチベーションになる。
「例えば筋電義手は型を取って自分に適合したソケットがなければ装着できないし使えないわけです。でもFinchなら、ある程度サイズさえ合っていれば誰でも着けられるし、使い心地を試すこともできる。腕を切断した直後にも着けることが可能です。病院に置いてあれば、すぐさま装着できるというのは大きなメリットになります。それで価格も買いやすければハードルも下がりますし、自分の生活のなかに義手を取り入れてみようという人も増える。筋電義手は、機能は優れていても、使い心地を試せる場所は多くはありません」
世界的に見ても義手の技術革新は進み、5指を備えた高機能の筋電義手は多々開発されている。ところが非常に高額(高いものは600万程度)なうえ、試す機会さえないのが現状だ。値段の面でも取り入れやすく、すぐさま使える義手はやはり革新的だ。加えて“3指”という仕様は使いやすさに重点を置いている。
装飾義手ユーザーの“2本目”というイメージ
 「ロボット工学では、3指は結構使うんです。安定して物を把持できる形状ですので。ただ義手では対向3指は確かに珍しい。まず、義手は見た目も手に似せようというのが通常の考え方です。それに対してFinchは、手に似ていなくても、格好良くて道具としての機能を追求するという割り切りで生まれました。いろんなものが持てたり、直感的に操作できたり、容易に着脱できたり、低コストだったり、そういう利点に着目しています。どちらかというと装飾義手ユーザーの“2本目”というイメージ。例えば普段は装飾義手をつけていて、Finchは細かな作業をするときに活用するという使い分けができます。軽いのでカバンに入れて持ち歩いてもいいですし」
「ロボット工学では、3指は結構使うんです。安定して物を把持できる形状ですので。ただ義手では対向3指は確かに珍しい。まず、義手は見た目も手に似せようというのが通常の考え方です。それに対してFinchは、手に似ていなくても、格好良くて道具としての機能を追求するという割り切りで生まれました。いろんなものが持てたり、直感的に操作できたり、容易に着脱できたり、低コストだったり、そういう利点に着目しています。どちらかというと装飾義手ユーザーの“2本目”というイメージ。例えば普段は装飾義手をつけていて、Finchは細かな作業をするときに活用するという使い分けができます。軽いのでカバンに入れて持ち歩いてもいいですし」
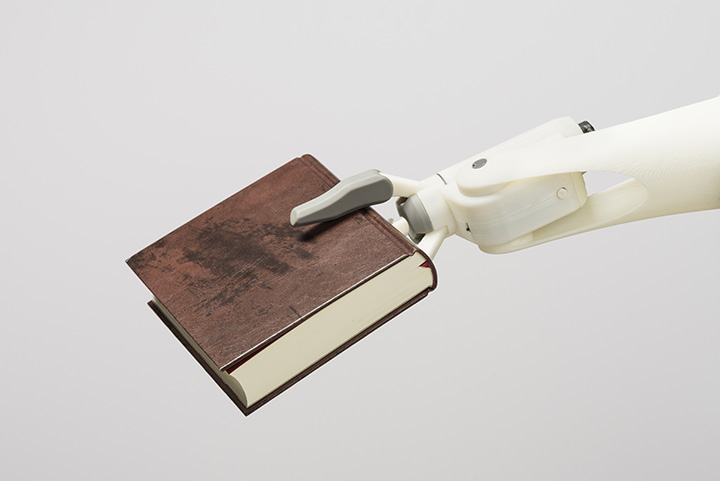

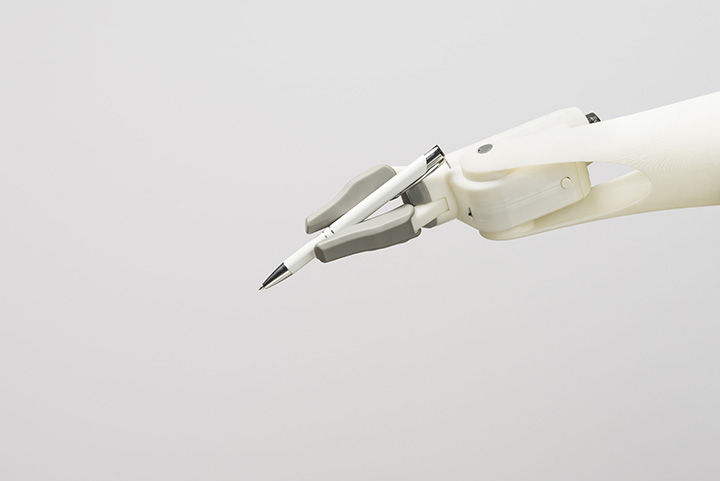
一般的には500gの物が持てれば快適に生活できるといわれる。Finchの3指構造はその条件をクリアし、形状の異なるあらゆる形にも対応する。
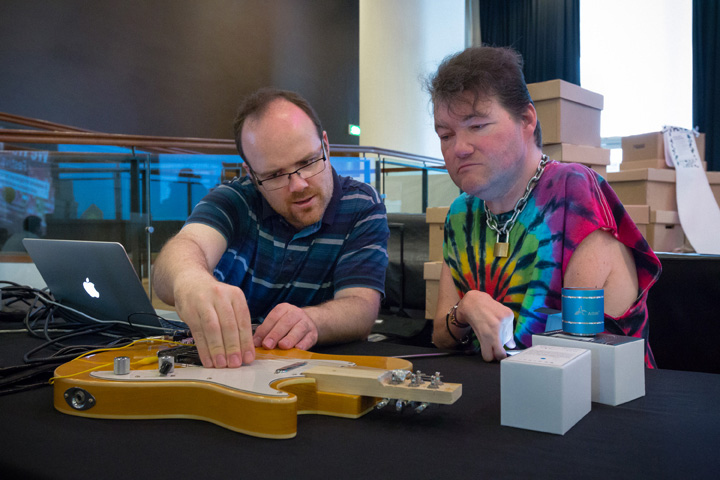
“2本目の義手”。シーンによって使い分ける義手という考え方は、ユーザーの生活の幅をさらに広げる可能性を感じる。そうなると操作性も気になるところだが、かつてソフト研究に没頭していた吉川氏がFinchに採用したのは、極めて単純な距離センサーだ。筋隆起によりセンサーと皮膚の距離を近づけるだけで簡単に動かせる。
筋隆起させるだけで簡単に操作できる
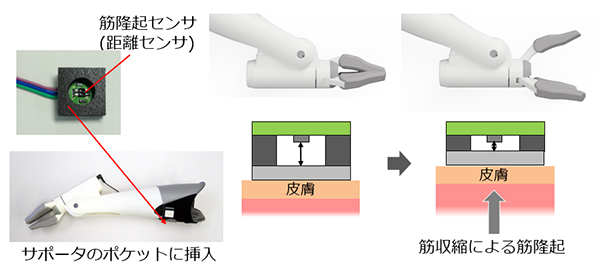
Finch内蔵のセンサーは、筋隆起で皮膚との距離が縮まると反応するシンプルなもの。筋隆起したときに開くのか閉じるのかは、ボタン一つで設定できる。
「圧力ではなく距離で反応するセンサーを配置しているので、Finchは腕に力を入れて筋隆起させるだけで簡単に動かせます。これは学習しやすいので、今まで30〜40人ぐらいはめてみて、動かせなかった人はいません。筋電センサーの場合は、センサーの反応を可視化してそれを見ながら訓練する必要がありますが、Finchはその必要もないんです」
軽くて安価、しかも操作性が高いとなれば、もっと病院に普及しユーザーが増えてもおかしくないはずだ。どこの病院でもFinchのような義手があれば、電動義手への入り口は広くなり、ユーザーの生活は変わるのではないか? そんな疑問を吉川氏に投げかけると、まだまだ多くの障壁があるという。
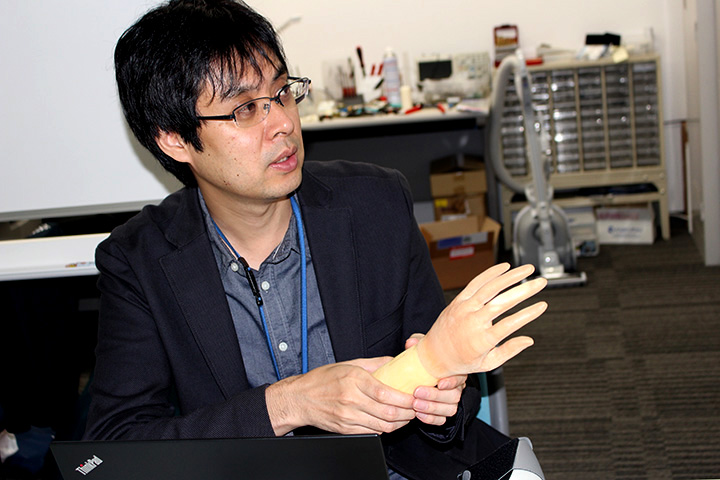
まずは使ってもらう環境が不可欠
研究室とは別フロアにも吉川氏の作業スペースが設けられている。こちらに常備してある小さめの3Dプリンターを活用することもしばしば。
「ロボット工学と医療のクロスオーバーは、まだまだ難しい現状はあります。医療の現場とエンジニアがうまくモノづくりで連携するのは、そんなに簡単ではありません。Finchもかなりユーザーテストを重ねました。まずは医療の現場で評価してもらわないといけないので、使ってもらう環境がないと始まりません。連携や協力していただける病院がないとプロダクトの良し悪しも判断してもらえないんです。Finchは、大阪労災病院で1年ぐらい入院している方に使用していただけたんですが、それが大きかったです。自分も毎週病院に足を運んで、故障が起きたときにはすぐ対応するということを1年続けました。いい物を作っても、安全性や利点を広く認知していただくには、そういう地道な動きが開発者側にも求められます。そういうことをこれからも実践していかなければなりませんね」
Finchに限らず、良質のプロダクトが医療の現場で浸透していくためには、それを使ってもらう環境作りが必要であることは自明だ。モノづくりとは別の努力が求められるが、吉川氏は、今も病院には足繁く通い現場の声やニーズを聞くことを怠っていないという。そんな状況とは別に、超情報化社会のいま、ネットなどを通してFinchを知り、問い合わせをしてくる方も増えている。

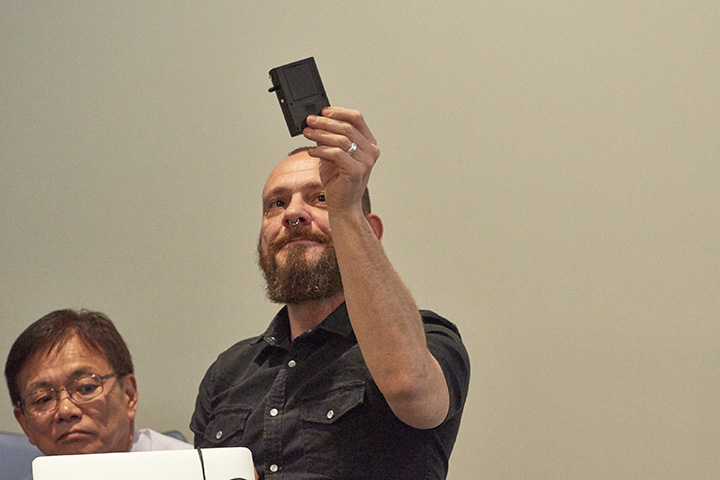
無駄を削ぎ落としたシャープなフォルムが印象的なFinch。ロボティクスの技術が活かされた対向3指構造は、これまでの義手のイメージを覆した。総重量330g、価格は15万円。
「実は、“子供用Finchはありませんか?”という問い合わせがすごく多いんです。昔は特に先天性のお子さんなどは義手を着けないことが普通だったんですが、工作や遊びの道具として着けさせたいという親御さんが増えています。作ってもすぐに子供は大きくなってしまうので、あまり高価なものを買うのは合理的ではありませんが、Finchなら買いやすいと思われるようです。そういう状況もあって、小さい子供用Finchの試作も進んでいます」
やはり“お手軽”さは、子どもにも受け入れやすく、これなら着けてみたい、トライしたいと思えるということだろう。それだけではなく、Finchのユーザーからは新たなアイデアや提案をもらうことも多いそうだ。
「Suicaを内蔵して欲しいと提案されたこともありますし、空いたスペースに飴を忍ばせているというユーザーもいます(笑)。実際に使っている方の意見は本当に貴重です。今後は、料理専用とか、先をドライバーにするとか、限られた用途に応じられるFinchの変換パーツのようなものも開発できるといいと思います。これからも、ひたすら工具と格闘する日々は続きますが、もともとプラモデル作りが好きなので苦ではありませんよ(笑)」
吉川雅博(よしかわ・まさひろ)
大阪工業大学ロボティクス&デザイン工学部システムデザイン工学科准教授。北海道大学文学部で認知神経科学を学び、卒業後はIT企業に入社。企画・マーケティングに従事した後、筑波大学に再入学。産業技術研究所の研究員を経て、奈良先端科学技術大学院大学ロボティクス研究室の助教に就任。2016年4月より現職。専門は福祉工学。国立障害者リハビリテーションセンター研究所の河島則天氏とFinchを企画立案したのは2011年。東京大学生産技術研究所の山中俊治氏も開発に加わり、同プロダクトは、2016年の1月にはダイヤ工業より正式に販売を開始。同年、超モノづくり部品大賞にて健康・バイオ・医療機器部品賞を受賞。