2019年1月8日~11日の4日間、アメリカ・ラスベガスで開催された世界最大級の家電・エレクトロニクス技術展示会「Consumer Electronics Show (CES) 2019」。毎年開催される世界最大規模のこの見本市では、この1年のみならず、これからの未来を予見させる製品や技術が集まるだけに、全世界から18万2000人以上が来場。参加企業はなんと4400社以上というビッグスケール。今年は最新のテレビやオーディオといった家電の分野だけでなく、5G回線を使った製品や、AI搭載製品、モビリティ関連、ヘルスケアといったジャンルが話題になっていた模様。その中から、気になる製品を5つピックアップしたので紹介していきたい。
高い場所にいても車イスのまま乗り込める!?
災害時にも役立つ四足歩行可能なモビリティ

韓国の自動車メーカーであるHyundai(現代自動車)は、通常は4輪自動車のように高速走行ができ、いざというときには四足歩行での移動ができる「Elevate」のコンセプトデザインを発表した。

車輪を変形させて四足歩行モードになると、前後左右だけでなく上部にも移動でき、高さ5フィート(約152cm)の段差をも登ることができるという。もちろん、障害物をまたぐことも可能。これにより、地震や噴火、水害、大雪といった各種自然災害時の救助に役立てることもできる。また、欧米のアパートなどに多い、建物の正面階段を上ることができるため、タクシーとして利用すれば車いすユーザーも容易に乗り込むことができるといった使い方も披露された。
動力はEV(電気自動車)であり、Hyundaiではこれを「Ultimate Mobility Vehicle(究極の移動手段)」と謳っている。

自動運転機能搭載の車イスに
シェアリングサービス機能をプラス

横浜に本社を置くWHILLは、自動運転・自動停止機能を備えたパーソナルモビリティを発表。これは空港や商業施設などでのシェアリングを想定しており、アプリでWHILLを呼び出したり、乗り捨てたあとは自動で待機場所に戻るといった機能も搭載されている。

開発のきっかけとなったのは、空港や駅、商業施設などで、車いすの介助や、車いすの回収に多くの人手が必要とされている現状がある。とくに先進国の多くは「旅客の権利」が保護されており、EUでは乗客の乗降に必要な支援を無償で提供することを、事業者に法令で義務付けている。そのため、航空業界では車いすの介助や回収のための人手やコストが年々増え続けているというのだ。運用側にとっては費用が抑えられるという利点があるが、利用者にとっても人の手を借りずに好きな場所に移動できるというのは大きなメリットである。
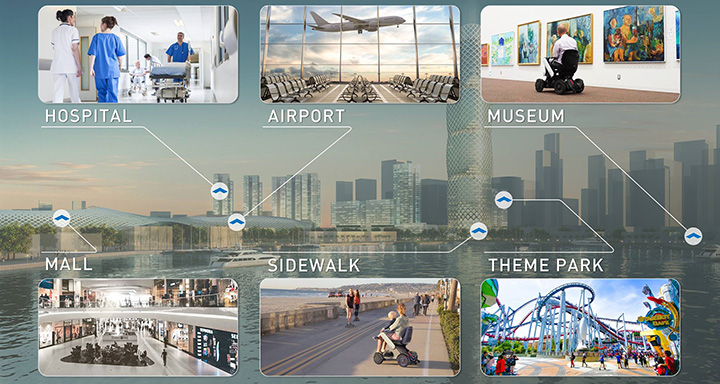
すでにオランダのスキポール空港や英国のヒースロー空港などで実用化に向けた協議が進められており、いずれはスポーツ施設や商業施設、観光地などでも順次実用化されていく予定。なお、「WHILL自動運転システム」は、CES2019のAccessibilityカテゴリで最優秀賞を受賞した。
自分の健康状態を常にチェック!
いつでもどこでも心電図、家庭で心血管疾患検出

フランスのメーカーWithingsは、いつでもどこでも心電図が取れるアナログウォッチ「Move ECG」と、自宅でさまざまな心血管疾患を検出できる血圧・心拍数・心電図監視・デジタル聴診器を搭載した「BPM Core」を展示。
「Move ECG」はウォッチケースに指を置くだけで、20秒後に心電図が記録されるというもの。データは専用アプリを搭載したスマートフォンなどにリアルタイムで表示され、専門家に相談が必要な場合は警告が発せられる。さらに、心電図記録を医師に送信することも可能だ。

本体は、12ヶ月という長期のバッテリー寿命と最大50mの耐水性を実現。運動を促進させる機能としてのウォーキング、ランニング、スイミングの自動追跡や、体重や睡眠状態も記録してくれる。さらに階段昇段用の高度計も搭載。
「BPM Core」は、Afib(心房細動)と心臓弁膜症のリスクを検出するための心電図とデジタル聴診器を統合したスマート血圧モニター。腕に巻いた状態で3種類(血圧モニター、心電図、デジタル聴診器)を測定することができ、すべては90秒で終了する。本体のLED表示で結果を確認することができ、専用アプリを使えばすべての履歴を確認することも可能。
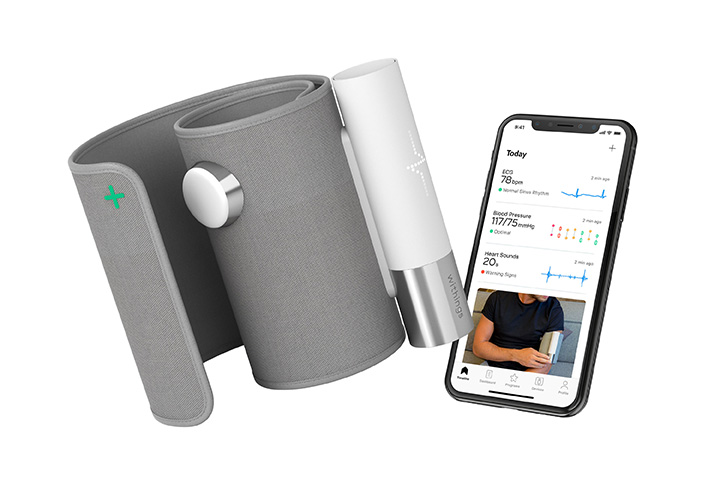
アメリカでは成人の3人に1人が高血圧に苦しんでいるといわれ、米国心臓協会と欧州高血圧学会は共に、高血圧症に苦しむ人に向けた腕用カフスタイル機器による在宅血圧モニタリングを推奨している。
「Move ECG」「BPM Core」ともに、CES2019のINNOVATIONアワードを受賞。
世界初の8K OLED(有機EL)テレビは
これまた世界初の巻き取り式!

韓国の家電メーカーLGからは、世界初の巻き取り式テレビ「The LG SIGNATURE OLED TV R」が登場。テレビを観ないときは自動でくるくると巻かれてボックスに収納されるというのは画期的。ディスプレイは、すべてを露出させるFull Viewと、時計や写真フレームなど必要なサイズの画面を露出させるLine View、すべてを収納させるZero Viewの3つのモードを用意している。
今回発表されたのは、8K(7,680×4,320)で88インチという末広がりな仕様。これまではテレビの置き場所次第で部屋の使い方が限定されてしまったが、これがあれば設置場所のバラエティも増え、何より空間を美しく演出することができる。

CESでは他に、中国のスタートアップ企業ROYOLEより曲げられるスマホ「FlexPai」が展示されるなど、OLED(有機EL)は今後も大きな発展が期待される。
役に立たない家族型ロボットに
海外メディアも注目!

日本ではすでに購入予約も始まり、さまざまなメディアで取り上げられて話題になっている家族型ロボットの「LOVOT(ラボット)」。日本のロボティクスメーカー、GROOVE Xによる製品だ。これは、家族の一員として愛されるペットのような存在を目指したもので、掃除や洗濯をするなど家事を担ってくれるといったことはしてくれない。しかし、人肌に近い体温があり、抱き心地にもこだわって作られているなど、とにかく愛くるしい。また、世話してくれる人の顔を覚える顔認証(イヤがることばかりする人には寄ってこなくなる)、視線を合わせる機能、後ろをついてくる追従機能、抱っこするとホイールを自動で収納して抱っこをねだるモード、障害物を検知してぶつからずに移動する機能などを搭載。

基本的には愛でるものだが、本体にはAIや各種センサー、カメラなどが搭載されており、人を検知すると撮影して報告してくれるお留守番機能や、赤ちゃんの見守り、家の見回り、抱っこされた時間やお着替えされた時間など毎日の様子をプライバシーに考慮しつつ記録するダイアリー機能などを有している。

家族の一員としてのロボットは極めて日本的な発想だが、その愛くるしさやユニークさにBBC、CNETといった大手メディアからも取り上げられ、大きな注目を集めた。
 2017年春ごろには、顧客メーカーや研究機関と協力して、ロボットや福祉用具などのプロダクトの普及に努めていく予定だそうです。さらに、一般の小口ユーザーにもネット販売を開始する予定とのこと。マッキベン型人工筋肉が、私たちの社会の未来を変える日は、そう遠くないかもしれません。
2017年春ごろには、顧客メーカーや研究機関と協力して、ロボットや福祉用具などのプロダクトの普及に努めていく予定だそうです。さらに、一般の小口ユーザーにもネット販売を開始する予定とのこと。マッキベン型人工筋肉が、私たちの社会の未来を変える日は、そう遠くないかもしれません。