目次
先日、「RDSプロジェクト発表会」の模様をレポートしたばかりだが、ここでは特に注目したいRDS社の最新プロダクト・最新車いすレーサー『WF01TR』と、シーティングポジションの最適化を測るシミュレーター『SS01』の詳細をリポートしていく。
9月18日におこなわれた「RDSプロジェクト発表会」では、多くの記者が詰め掛けた。彼らの目的は、車いす陸上アスリートの伊藤智也選手を開発ドライバーに迎えた、車いすレーサー『WF01TR』の全貌だ。さらに、当日のサプライズとなったのは、伊藤選手との開発をきっかけに誕生したシミュレーター『SS01』。前回お伝えしきれなかった、記者発表当日の模様とは?
開発に関われる喜び、そして素晴らしい
マシーンが完成した(伊藤選手)
杉原行里 (RDS代表取締役、以下杉原):伊藤選手、まずは今回発表した車いすレーサー『WF01TR』の感想を教えてください。
伊藤智也 (WF01TR開発ドライバー/車いす陸上アスリート、以下伊藤):そもそも、車いすレーサーの「開発」という魅力的なプロジェクトに、自分が参加できる喜びがありました。その気持ちはいまも変わっていません。最終的に、こんなにも素晴らしいマシーンが完成して。現在は、『WF01TR』にどう自分がアジャストしていくか、という新しい楽しみの段階に入っています。とにかく嬉しいという思いしかないです。
杉原:伊藤選手とは、2016年にスイスの大会でお会いしまして。そこで意気投合したのがきっかけでした。
伊藤:あのとき、「このおっさん、まだ目が死んでないな」と言われたんですよ(笑)。嬉しさと同時に、本心を見抜かれた悔しさがありました。
杉原:いやいや。あまりにも目力があったので、現役の選手だと思ったんです。そして、直感的に面白いことができそうだと感じたので、開発ドライバーをお願いしました。でも、始まってみると注文が多くて(笑)。今回のプロジェクトは、伊藤選手モデルを作るのが目的ではなく、あくまでも開発ドライバーという立場でした。でも開発が始まった当初は、RDSのエンジニアとはバチバチでしたよね(笑)。
伊藤:はい、意見が合うことのほうが少なかった。私は感覚で言ってるのに、エンジニアの方々は何でもかんでも可視化して数値化して話してくる。そこには逆らえないじゃないですか。
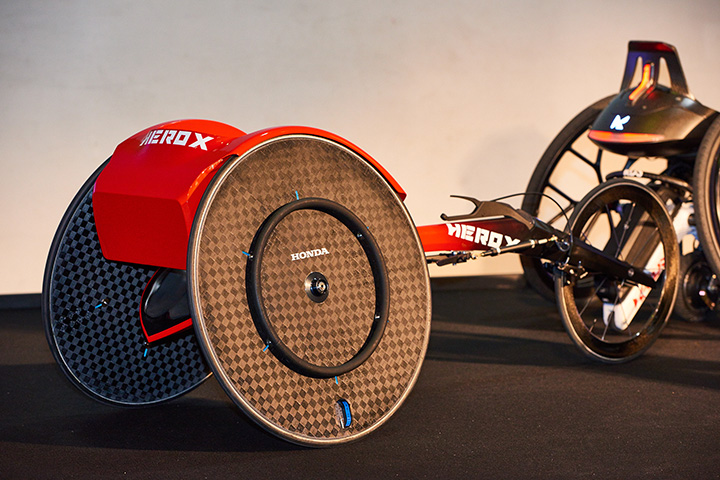
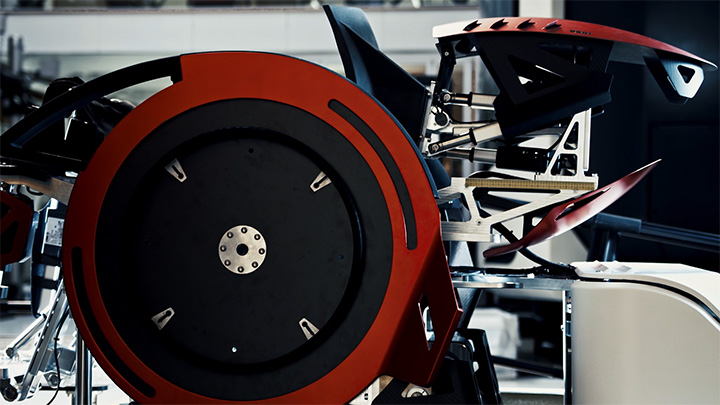
『WF01TR』メイン素材は、オートクレーブ成形されたドライカーボン。その他、アルミの削り出し、FDM方式による3Dプリンター、粉末造形方式による3Dプリンターなど、多種多様な素材・製法のパーツが組み合わされている。総重量7.8kg。価格250万円(各種最適化含む)。発売中。
ランナーにとって
新しい時代の幕開けになる
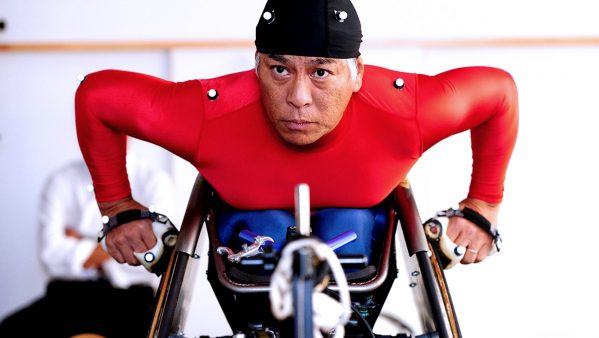
杉原:開発にあたり、RDSではモーションキャプチャーを使って身体の動きを測ったり、ハイスピードカメラ、フォースプレートなどを使って、伊藤選手の身体を解析していったんです。なぜそうしたか、それは、アスリートと対等に意見交換するためには、共通認識が可能なコミュニケーションツールが必要だと思うためです。当然ながら、伊藤さんの表現は「ここが硬い」「痛い」など抽象的なもの。エンジニアをはじめとする僕らには、その感覚を可視化する必要がありました。だからこそ、数値化することはこのプロジェクトにとって大変重要なことでした。
伊藤:僕からすると「丸裸」にされたようなものでした。全身のデータがあるもんだから、エンジニアの方がふざけて、僕のミニチュアフィギュアを3Dプリンターで勝手に作ってきたり(笑)。
杉原:伊藤選手は、世界的にも漕ぐフォームがきれいなことで有名なんです。そんな選手でも、ギアとギアの関係のように、グローブとハンドリムが最適な状態で噛み合っていないと正しく力が伝わらない。つまりスピードが出ないんです。ある場面では、伊藤選手が主張する自らの動きと、僕らの意見が食い違う。そこでハイスピードカメラで撮影したら、実際は真逆の動きをしていた、なんてことがありました。それほど、人間の感覚っていうのは不思議なんです。それだけに、テクノロジーと照らし合わせると新しい発見がある。
伊藤:あれにはビックリしました。でも、徹底的に数値化される、こういったやり方は、ランナーにとって新しい時代の幕開けだと思う。丸裸にされた結果、もう一度基礎から組み立てて作ることができるし、理に適った走りができるようになるわけです。

伊藤智也 車いす陸上アスリート。1999年から車いす陸上競技を始め、2005年にプロ転向。2008年の北京パラリンリンピックで金メダル2個、ロンドンパラリンピックでは銀メダル3個を獲得。「800m T52」の世界記録保持者。2012年に引退するも、2017年に現役復帰を宣言。2020を目指す。
杉原:さらに、『WF01TR』の開発を通じてわかったことは、シーティングポジションの重要性でした。人間は座っている姿勢によって、発揮できるパフォーマンスがまったく変わってしまう。今回はその点を解明できたことが大きかった。スウィートスポート(最適なポジション)を見つけるのに約2年かかりましたが、先月のテスト走行ではすごい記録がでましたよね。
伊藤:一般的に、400mの全力疾走は人間の限界と言われているんです。だから、ゴールをした瞬間は息も絶え絶え。それが、先月のテスト走行ではゴール後も余裕で喋ることができた。なぜなら、自分としては必死に漕いだ感覚がないんです。「実際の走り」と「自分の感覚」があまりにも一致しないので、軽く落ち込んだほど。でも、いまから2020年に向けて、『WF01TR』をいかに速く走らせるかに全力で取り組んでいきます。そして、みんなが想像されている最高の結果にしていきたいと思っています!
杉原:伊藤選手ありがとうございました。
(拍手のなか、伊藤選手退場)



WF01TR紹介サイト:http://rds-pr.com/wf01tr/
シーティングポジションの最適化を
オートメーション化
杉原:伊藤選手と取り組んだ車いすレーサー『WF01TR』の開発でわかったことは、感覚の可視化・数値化の重要性でした。それを測るため、当初はローラー台にプロトタイプを乗せ、モーションキャプチャーなどを使って測定していきました。最終的にスウィートスポートの見つけ方が判明しましたが、このやり方と、自社のリソースでは、数ヶ月に2、3名を計測するのが限界。それでは皆さんの生活を向上させることはできない。そこで、私たちはシーティングポジションの最適化をオートメーション化するロボット。それが、次にご紹介する『SS01』です。
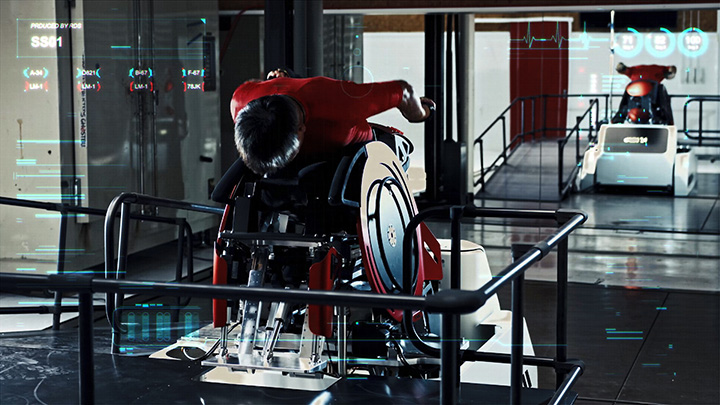

『SS01』 千葉工業大学未来ロボットセンター「fuRo」との共同開発によって生まれたシミュレーター。背もたれ、座面、ホイールのチャンバー角、幅、フットレストなどを調整し、自分の体に最適化したシーティングポジションを見つけ出す。これにより、ユーザーは最大限能力を発揮でき、心地よいと思えるシートポジションが把握できる。
SS01紹介サイト:http://rds-pr.com/ss01/
杉原:このシミュレーターは、背もたれや座面、ホイールのチャンバー角などが可変します。また、下部には触覚センサーを搭載しているので、お尻の形も計測できる。そうやって、ありとあらゆる「変数」を手に入れることで「計測」し「解析」していく世界初のマシーンです。自社調べですけど(笑)。しかし、「計測から解析」という流れが一番難しいところで、今後の課題が多いのも事実です。将来的には、人が車いすに合わせるのではなく、車いすが人に合わせる。そういう新しい概念を生んで行きたいと思っています。ただ、このシミュレーターはRDSだけの力では実現することができませんでした。そこで、私が尊敬するfuRoさんのお力をお借りしました。今日は、千葉工業大学・未来ロボット技術研究センターの副所長・清水正晴さんにもお越しいただいております。
清水 (千葉工業大学・未来ロボット技術研究センター 副所長):よろしくお願いします。
我々の思っている未来を、一緒に実現できる仲間
(fuRo副所長・清水さん)
杉原:fuRo (千葉工業大学・未来ロボット技術研究センター) のことをご存知ない方もいらっしゃると思いますが、本当にすごい研究をされているんです。さまざまなロボットを作られていて、すごくワクワクする研究所です。

清水:では、簡単に組織を紹介させてください。写真は、我々がRidRoid (ライドロイド) シリーズと呼んでいる最新プロダクト『CanguRo (カングーロ)』です。乗るとパーソナルモビリティになり、変形すると我々の相棒となって付いてきてくれたりします。
杉原:ライドロイドとは、新しい言葉ですか?
清水:我々が考えたコンセプトであり造語です。ライドは「パーソナルモビリティのモード」、ロイドは「ロボットモード」でありパートナーになることを意味します。人とモビリティの距離を縮め、身体能力を拡張していこうという考えのもとに生まれました。
杉原:私も乗らせていただきましたが、こんなに楽しい乗り物が世の中にあるのか! とビックリしたんです。乗り物って、意外に遊びの要素が少なかったりしますが、ライドロイドは違う。
清水:はい、実はこれ自体がスポーツともいえます。車いすに似ていますが、「乗ってかっこいい」「乗りこなすと楽しい」プロダクトになっています。
杉原:「乗ってみたい!」と能動的にさせてくれるプロダクトですよね。
清水:それこそが私たちの考えていることであり、今回の『SS01』を含むRDSさんのプロジェクトと合致する思いだったんです。
杉原:共同開発をお願いするにあたって、まずは所長の古田さんにご挨拶に伺ったんです。最初はすごく緊張したんですが、面接が始まって2分で一緒にやれることが決まりました。面接という名の美味しい食事会でしたが。(笑)
清水:我々の思っている未来を、一緒に実現できる仲間だとすぐに思いました。
杉原:光栄です。では、『SS01』の説明をお願いします。
fuRo ロボット技術による文明・文化の貢献を目指す「千葉工業大学未来ロボット技術研究センターfuRo」。2011年に起こった福島原子力発電所の事故において、原子炉建屋内の最上階まで走破するなど、崩壊状況の調査にも活用された災害対応ロボット (原発対応型Quince) で知られる。主人の後を追ったり、指定された目的地まで自律的に移動するロボットでありながら、変形して乗り物にもなるパートナーロボット(CanguRo) など、多種多様なロボットおよびロボット技術の開発をおこなっている。
シミュレーター『SS01』はロボットです
(fuRo副所長・清水さん)
清水:今回、車いすのシミュレーターを開発するにあたってロボットの技術を3つ投入しました。まずは、シートのポジションを動かすことができる「モーター制御」。『SS01』には15個の可動部があり、ロボットでいえば15の関節があるのと同じです。
杉原:関節が15個あるってすごいことですよね。
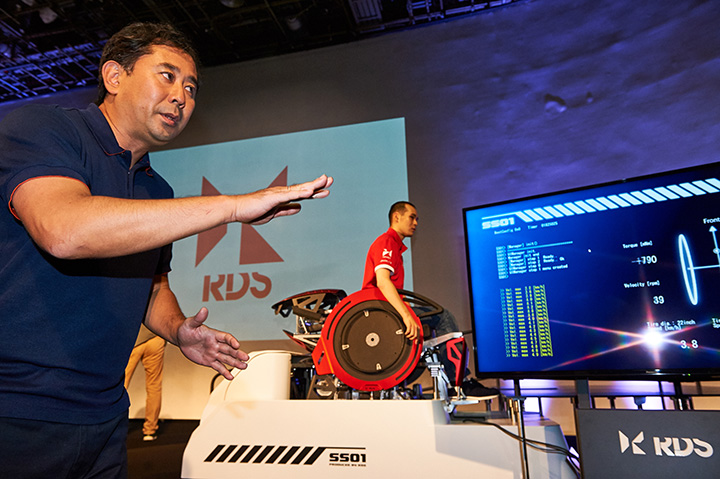
清水:もうひとつは計測技術。車いすを漕いでいるときにどれくらいの力が加わっているのか、車輪のスピード、重心の位置といった計測は、「トルク制御」の技術が使われています。とくに、重心の計測をリアルタイムでおこなうことは、ロボットを動かすうえで欠かせません。
杉原:ロボットを安定して走行させるための肝ですよね。
清水:はい。しかも、重心のズレをリアルタイムで計測できるので、モニターを見ながら漕げばトレーニングマシーンとしても使えます。そして最後は「ホイール不可制御」の技術。こちらもモーターを使って、ホイールの負荷を動的に制御しています。これら3つの技術を使うことで、リアルタイムにダイナミックな計測ができる。我々の感覚では、『SS01』はロボットなんです。

eスポーツやオフィスワーカー向け
開発も視野に
杉原:ロボットだと言われると、皆さんも乗りたくなりますよね? 倫理承認を得たうえで、今後は国立障害者リハビリテーションセンター研究所と共に、車いすユーザーのパーソナルデータを計測、解析するプロジェクトがスタートします。より多くのデータを採取することでアルゴリズムを解析。今後は、競技用や日常用の車いすだけでなく、eスポーツの分野にも進出していきたい。さらには、高齢者やオフィスワーカーなど長時間座ることの多い人に向けた、QOLの向上をサポートできると考えています。