日本人にもっとも馴染みぶかいロボットといえば、人のような動きをするPepperではないだろうか。回転寿司チェーンでは受付を任されている。身近になりつつあるロボットだが、いうまでもなく、一つのロボットができるまでには多くの人が関わっているが、ロボット開発に欠かせない存在となりつつあるのが、パルスボッツ株式会社代表の美馬直輝氏だ。美馬氏は同社の他、アパレルブランドや大物アーティストのファンクラブアプリ開発などを手掛けるハイジ・インターフェイス株式会社を創業、現在は取締役CXOとして活躍している。そんな美馬氏が作り話題となったのが睡眠サポートロボット「ネモフ」。クラウドファンディングで限定100台を販売したところ、なんと14時間で完売した。今年はそんな「ネモフ」の新型の発売が予定されている。ロボットは今後、どのように進化していくのだろうか。HERO X編集長・杉原行里が話を聞く。
必要なのは社会性
ロボットが世の中に浸透するために必要なこと
杉原:今日はどうぞよろしくお願いします。美馬さんはいろいろな会社を経営されていると思うのですが、今回はパルスボッツについてお伺いしたいと思います。
こちらの会社ではどのようなことをされているのでしょうか?
美馬:はい、今開発、販売しているのは主に二つで、チャットボットを気軽に作れる「IFRO」というサービスと、睡眠サポートロボット「ネモフ」です。

杉原:僕がすごく面白いなと思ったのはこのロボットに社会性を持たせるというところで、すごく面白い着眼点だなと思うのと同時に、非常に大事な部分だなと感じたんです。ロボットに社会性というのは、具体的にどういうことをイメージしたらいいのでしょうか? 2022年に発売の新型からそうなるのですかね?
美馬:僕がロボットにはじめて出会った時に、どうやったらこのロボットと仲良くなれるかな?と考えたんです。その時に、ロボット自身が社会性を持っていないと、仲良くなれないというところに行きついたんです。
人同士も誰かを信頼して、仲良くなろうと思ったときに、その人が自分との関係しか持っていなかったら、信頼のしようがないですよね。そもそも信頼っていうものは社会性があって初めて成立するのかなと。だから、ロボットが社会の一員になっていることが必要だというふうに思って、それを実現したいと思ってやっています。
杉原:なるほど。僕もロボット関係はいろいろやっているのですが、ロボットという言葉、定義ってものすごく難しくないですか? ロボットという言葉に対しての印象というのは人それぞれ全く違う。社会実装がいろいろなところで始まっていますが、やはり今が過渡期だと思うんです。
ロボットがこれからどんどんよりコンシューマーに近づいた状態、もっと言うと、漫画の世界で僕らが見ていたドラえもんのような世界観に近づいていくと僕は思っています。
先ほど美馬さんは「社会性が必要だ」と言われましたが、例えば、コミュニケーションを密にとることによって、そのロボットとの信頼度を高めていくというのが、一つのアプローチなのでしょうか?
美馬:そうですね、一番最初に弊社で作ったパルスボッツという社名そのもののサービスがあるんですけど、ロボット同士を繋げて、社会性を半ば擬似的に持たせるロボットSNSみたいなものを作ったんです。
それはオーナーとロボットの対話の中で、ロボットとオーナーが何か親密になっていく流れがあってその親密度が増すと、オーナーが別のオーナーのロボットを友達にしてあげることができるというものでした。
パルスボッツ株式会社がYouTubeで公開しているコンセプトムービーには、まるでネモフとその仲間たちが井戸端会議をしているような場面が登場する。
美馬:インターネット上にSNSのような疑似的な場所を作って、そこで友達になったロボット同士が会話をしはじめるんです。
杉原:どんな会話をするんですか?
美馬:ロボットがオーナーとしゃべったことを疑似的なSNS上でつぶやくんです。例えば、「この前うちのオーナーがこんなこと言ってさ」みたいにつぶやくと、それに対して友達のロボットが「面白いね」ってつぶやき、友達のロボットが、自分のオーナーに「誰々くんとこんな会話があったらしいよ、どう思う?」というように、人からロボットに伝わった話がロボットの間で伝播して伝わって、それを向こうのロボットと人の間でも伝播される、こういう構造のSNSサービスというものを最初にやっていました。
体験としてはめちゃくちゃ面白くて、ロボットが社会に実装されていく中で、このロボット同士のコミュニケーションというのは必ず必要だし、この実験をやって、ロボットが自分のことを分かってくれているとか、そういう感覚が人の側にも生まれるのだなということを思いましたね。
杉原:その後、そのまま事業としてはじめられたのですか?
美馬:それがですね、そうはいかなかったんです。コンセプトとしても体験としても何一つ間違いはなかったと思っているのですが、いかんせん、ロボットの普及がそこまで進まなかった。コンセプトを作った当時は、もう、この勢いで一家に1台、さらには一人一台コミュニケーションロボットを持つ時代にそのまま行くのかなと思っていたのですが、そうはならずに行き詰まってしまったんです。最終的にここにたどり着きたいとは思っていますが、今はまず、もう少しロボットを広げるところにコミットしていこうと思っています。
ゆる可愛いでロボットとしての
ハードルをあえて下げる
眠りを誘うオリジナルのお話は16話を収録。子どもへのプレゼントにも喜ばれそうだ。
杉原:そんな中、開発されたのがネモフ。見た目がすごく可愛いですね。
美馬:はい。パルスボッツでいろいろとやっているうちに、自分でも何かロボットを作ってみたいなと思って作ったのがネモフです。人型のロボットを作っていた時にお客様の反応としてあったのが、あんまり会話として成立しないなというところでした。一方で、ネモフの場合はこの見た目で目しかない。そもそも口もどこなのか分からない。賢そうにもみえないから、本当にこれがしゃべるのかな?くらいな感じで期待値が自然と下がる。
杉原:なるほど。
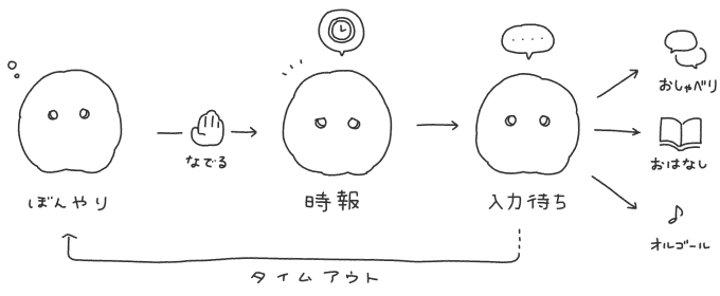
美馬:枕元に置いて使ってもらうことを想定して作ったロボットで、機能としては、触ると5分刻みのだいたいの時間を教えてくれるということと、アラーム機能、オルゴールの音楽を流してくれること、物語を語ってくれるというくらいです。
杉原:昔、アラームの音が嫌で投げてたこととかありますけど、ネモフだとなんかかわいそうだから投げないかもしれませんね(笑)。
美馬:コミュニケーションロボットがいくつか出てきた中で、課題だなと思ったところがあって、“コミュニケーションロボットです”として打ち出すと、人と同じようなコミュニケーションができないと、利用者の満足度は高くはなりにくくて、結局、多くはコミュニケーションをしなくなっちゃう、要するに、違和感が残るんです。
杉原:ネモフはもともと人型でもないから、人間並みのコミュニケーションができなくても違和感が少ないということですね。
美馬:はい。それから、そのロボットの居場所が作れるかというのも結構重要だと思っています。ネモフの場合は枕元という居場所が設定できたので、役割をしっかりと打ち出せた。
特性を磨き社会に貢献するロボットへ
杉原:美馬さんのお話を伺っていて思い出した映画があるんですが、1999年に公開された「アンドリューNDR114」という映画、ご存じですか?
美馬:知らないですね。
杉原:ロボットがディープラーニングで右脳的思考ができるようになって、対話をしていくことによって僕の勝手な想像ですけども、そのロボット自体のキャラクターとか、発する言葉とか、そういうものも学ばせていく。すると、そのオーナーとの関係性だったり、どういうコミュニケーション言語で表現をしていくのかなども変わっていく。その先に、ロボットが本当に人間のようになっていき、ロボットの人権について話し合われる時代がきたりとか、いろいろなことが起こるのですが、ロボット同士のコミュニケーションがはじまると、「アンドリューNDR114」のような世界が現実味を帯びてくるなと。
美馬:そこに到達するまでにはまだまだ課題は残っていると思います。世界中でまだそういった形のものを体験として実現してきているものというのはなかなかないので。
杉原:となると、コミュニケーションロボットというのは次にどのようなステップがくると思われていますか?

美馬:コミュニケーションロボットとしては実はGoogleアシスタントのようなものがすでにめちゃくちゃ世の中にあるんですよね。ただ、あれは実体がないので、あまり人々がロボットとして認識しておらず、それはそれで成立していますけれど、今お話ししているような実体を持ったロボットというのは、生物の進化と似ているのではないかと思っています。世界で一番普及している実体を持ったロボットというとお掃除ロボのルンバになるんですけど、あれってちょっと虫っぽいじゃないですか。
杉原:ルンバがもし人の形をしていたら、みんな買わないかもしれないですよね。
美馬:そうですね(笑)。今はそれぞれの役割に特化した進化をしている段階かなと思います。工場などで使われているアームロボットは一本腕で、腕や手の機能に特化しているし、スマートスピーカーは耳に特化している。特化した部分が成熟して、いずれ統合されていく。その後でコミュニケーションロボットというものが世の中で当たり前になっていくのかなと思います。
杉原:今後、例えば生体反応とかも取れるようになって、健康状態を把握したり、心の状態を測ってくれるというようなデータを使ってのコミュニケーションということも出てくるのでしょうか?
美馬:そうですね。間違いなくくると思います。
美馬直輝(みま・なおき)
2015年にロボット専門企業のパルスボッツ株式会社を創業し、大手メーカーロボットのコミュニケーション開発や、おやすみロボット「ネモフ」、コミュニケーションAI作成サービス「IFRO」などの開発を手がける。ASTRSK UXデザイナー・プロデューサー。ハイジ・インターフェイス株式会社 創業社長・現取締役CXO。タイムリープ株式会社 CXOなども兼任している。
関連記事を読む