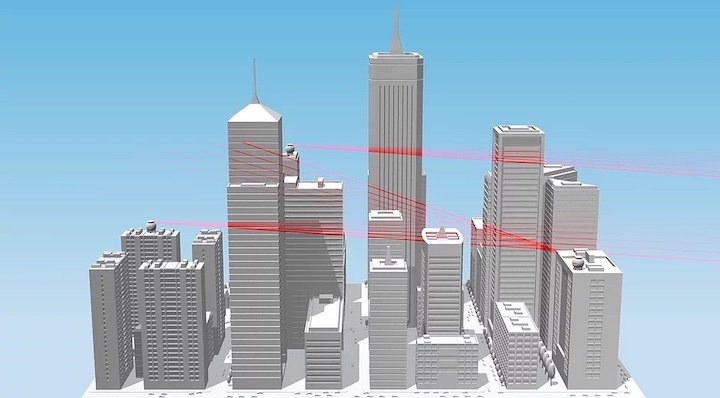
JETROが出展支援する、世界最大のテクノロジー見本市「CES」に参加した注目企業に本誌編集長・杉原行里が訪問。京都大学初のベンチャーとしてスタートし、高性能ドップラー・ライダーを開発したメトロウェザー株式会社。大気中にレーザーを照射することで、数キロ先の風向や風速を測定できるという装置で、装置自体は他社でも作られているが、今までにない距離と精度を提供するという。さらにゲリラ豪雨の予測や、ドローンの実証実験にも貢献している。ドローン技術はもちろん、都市防災にも並々ならぬ関心をもつ編集長が、同社代表取締役CEOの東邦明氏に「風を読む」技術の可能性を聞く!
ゲリラ豪雨や強風の
予測を「光」で行う
杉原:僕がメトロウェザーさんに興味を持ったのは、もちろん技術的な面もありますが、御社のウェブサイトにも掲載されている「風を制し、空の安全を守る」という言葉がカッコいいなと思ったからです。そもそも、なぜ「風」に行き着いたのですか?
東:もともと学生の時はゲリラ豪雨の予測というか、線状降水帯の研究をずっとやっていて風とは無縁だったのですが、京大大学院のポスドクで古本(京都大学生存圏研究所助教授、メトロウェザー取締役)の元を訪れてから、風に着目するようになりました。よくよく考えてみると、ゲリラ豪雨は夏の入道雲みたいな雲が急にわいてきて雨が降る。今もそうですが、当時はレーダーで予測できるといっても、10分前が限界で、誰が見ても雲が来ているのが見える。雲が急速に集まってくる時というのは、風が集積されて上昇気流ができるから、その風をとらえるともっと早く予測できるのではないかと考えました。あとは、大学の時にもうひとつやっていた研究が、滋賀県の強風だったんです。琵琶湖の西側で山と湖が非常に接近しているところがあって、そこは貨物列車が転覆するくらいの強烈なおろし風が吹くんですね。
杉原:あの風にうまく乗れたら、鳥人間コンテストでも戻ってこられますもんね(笑)。
東:そうそう (笑)。そこで、JR西日本の湖西線の電車がしょっちゅう止まる。その風を解明してほしいということで、共同研究していく中で、「風をとらえる」ということを始めました。最初は風見鶏みたいなものを置いていたのですが、それでは全体像がわからないので、リモートセンシングで測る方法として、海外のドップラー・ライダーを取り寄せてみたんです。それまで大学ではレーダーで風をとらえていたのですが、電波の場合は、どうしても四方八方へ広がることがあって、情報がノイズだらけになってしまう。あとは電波法の規制もあって自由に出せない。ドップラー・ライダーというのは、レーダーではなく光で風をとらえる装置です。でも、琵琶湖側に海外製のドップラー・ライダーを置いてみたら、当時は1キロメートル先もとらえることができなくて。
杉原:1キロ以内といったら、体感のほうが早いですよね。
東:そうなんです。僕は全然ダメだと思っていたら、古本が「自分たちで作ればいい」と言い出したんですね。それが2014年くらいで、2015年の5月にメトロウェザーを立ち上げました。
杉原:従来のものとは全く違うドップラー・ライダーを自社で開発されたということですが、信号処理技術、解析技術などを独自で研究開発されたということでしょうか?
東:そうです。当初は開発に5年もかかるとは思っていませんでした。基本的な原理や構成はレーダーとほぼ同じですし、信号処理の技術も、京大の大型レーダーで培ってきた信号処理技術を応用すれば、さほどハードルは高くないだろうと思って作り始めたのですが、いざ作り始めると、この部品とこの部品の組み合わせはNGとか、この部品とこの部品は相性がいいとか。
杉原:それは材質的な部分ですか?
東:部品メーカー同士の相性などです。どの組み合わせがいいのかは、組み合わせてみなければ分からない部分もあり、そうこうするうちに5年かかってしまいました。幸い、駆け出しのころにNEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)の補助金をいただいたり、「そういうチャレンジングなことをするのなら投資しよう」という投資家さんが現れたので、なんとか乗り切ったという感じです。
風を読む技術を
ドローン社会のインフラに
杉原:ドップラー・ライダーは10キロ圏内であれば、円としてセンシングできるんですか?
東:半径10キロ、条件がよければ15キロくらいの範囲をスキャンできます。もちろん、鏡を使ってレーザーをいろいろな方向に向けて円形にスキャンすることもできますし、斜め上に照射して三次元でとったりすることもできます。
杉原:やはり高い所に設置したほうがいいのでしょうか?
東:はい。見通しがいいところがいいので、おのずと鉄塔の上などがベストになります。

杉原:今、京大の中で研究しているということですが、仮に京都全域をドップラー・ライダーでセンシングするとなると、およそ何台くらい必要ですか?
東:京都盆地の中だったら、4、5台あればいけると思います。ざっくりとですが。
杉原:え? すごい。想像以上に少なかったです。でも、高い建物というだけではなく、障害物というのがキーですよね。これ、機材の大きさはどのくらいですか?
東:去年の3月にローンチしたタイプでだいたい1立方メートルくらい、重量がかなりあって350キロくらいです。ただ、今年の春には一辺が65センチ四方で重さが130キロくらいのものができます。
杉原:すごい。急に開発スピードが上がっていますね。いったん完成した後のスピードは、「今までなんだったんだ?」と思うくらいですよね。僕も開発しているので、わかります。ドップラー・ライダーはどういう場所で活用することになりますか? 企業のビルに業務委託の形で置かせてもらうのか、それとも公共の場所と手を組むのか。
東:最終的には、ドローンがこれからたくさん飛んでいく世界になった時のインフラにしたいと思っています。例えば、電柱や携帯の基地局に置いていきたいのですが、いきなりそこにはいけないので、今は協力してくださるビルオーナーのもとで、ビルの屋上などに置いているケースと、業務提携契約を結んでいるNTTコミュニケーションズ社の遊休鉄塔などを使わせてもらっています。
杉原:このドップラー・ライダーにはセンシングやアルゴリズムなど御社独自の技術があると思うのですが、出口がとても豊かだなと思います。いま東さんがおっしゃられていたドローン社会の到来もそうだと思うのですが、「風を制す」というところの中で、わかりやすいものでは、日本で社会課題になっている都市防災がありますよね。例えば御社のテクロノジーを使ったら、僕らが今こうむっている災害を防げるということはありますか?
東:防災の観点では、やはりゲリラ豪雨の予測ですね。東京の都市には地下空間がいっぱいあります。よく地下鉄の入り口に止水板が置いてありますが、ああいうものを設置するのに10分前予報だと間に合いません。これが30分前だと、なんとか間に合います。そういう形でドップラー・ライダーを使って浸水を防ぐ、なんらかの対策がとれる、というケースはよくお伺いします。
杉原:ゲリラ豪雨の特徴をもった特殊な風の集積ができた時に、それを感知して「あと30分後にゲリラ豪雨が来る可能性は何%くらいです」みたいな予報になるのでしょうか?
東:たぶん、そうなると思います。
杉原:うわあ、すごい。めちゃくちゃ傘が売れそうですね。
都市部で必要になってくる風の情報
杉原:あとはドローンのための風予測ですよね。今は長崎の五島列島など、人のいない場所で実証実験をやっていますが、都市部で飛ばす場合は、風が一番重要な情報といっても過言ではないと思います。
東:おっしゃる通りで、ANAの五島列島での実証実験で弊社のドップラー・ライダーが使用されたのですが、海の上は比較的乱れが少ないんです。都市に入って来た瞬間に、ビルや建物の影響がすごく出てくるので、風の情報が非常に重要になってきます。
杉原:ドローンに関しては、リアルタイムで24時間データを供給しながら、「今、どのルートがいいよ」と提案していくイメージですか?
東:そうですね。建物の情報はそんなに変わるものではないですが、唯一風の情報だけが時々刻々と変わっていくので。24時間365日の観測情報をドローンのオペレーターに提供していく形になると思います。
杉原:ということは、完全にオートメーション化していかないと、遅延が発生してしまうと、情報が全く違うものになってしまうということですね。
東:ええ。我々も今はほぼリアルタイムで風の情報を提供できるようになっていますが、「今の風」をいかに届けるかというのがポイントです。
杉原:具体的にはどのくらいの時期に実用化をめざしていますか?
東:ドップラー・ライダー自体はお客さんのもとに届いている状況で、サービスは今年中にはスタートしたいと思っています。今はユーザーインターフェース部分の開発を急いでいます。
杉原:それはお客さんによってユーザーインターフェースを変えていくということですか?
東:変えていかないといけない。基盤のところは変わらないのですが、どちらかというとドップラー・ライダーを売るというよりは情報を売るイメージです。だんだんITベンチャーチックな感じになっていくと思います。
ポスドクから
ベンチャー起業の前例となりたい
創業メンバーの四人で力と知恵を持ち寄り次のステージを目指すメトロウェザー。(画像元:https://www.metroweather.jp)
杉原:最後に今、日本はポスドク問題のようなものも言われていて、研究室で若手が席を確保するのは至難の技だとさえ言われます。その中で、ポスドクの期間終了時に研究職一本で行くのではなく、起業という選択もあるのではないかということを、御社の場合は示されているのかなと感じました。
東:おっしゃる通りで、ポスドクでよく言われるのが「次がない」ということですが、起業する道もあることを示したいというのは、初期のモチベーションとしてはありました。ディープテック系で成功した事例があまりないので、その成功事例の一つになれればいいなと思います。
杉原:僕もすごく興味があります。今日は貴重なお時間をありがとうございました。
東 邦昭(ひがし・くにあき)
メトロウェザー株式会社代表取締役CEO。2009年に京都大学のポスドクに着任後、大気レーダーを用いた乱気流検出・予測技術の開発・高分解能気象予測シミュレーションの開発を行う。民間気象予報会社において2年間の環境アセスメントの実務経験も持つ。2014年にポスドクを辞めた後、1年間の起業準備期間を経て、2015年に古本氏とともに京都大学発スタートアップとしてメトロウェザーを設立。代表取締役。神戸大学博士(理学)・気象予報士。
(トップ画像:https://www.metroweather.jp)