超高齢化社会が加速する中で、大きなカギとなっている高齢者に対する自立支援。今回紹介する『AYUMI EYE』は、歩行能力の評価により、高齢者の体力を測定するとともに、「運動したい」「自由に出かけたい」というモチベーションも高めてくれそうなアイテムだ。
モジュール(加速度センサー)を腰部に装着し、6~10メートル歩くだけで、独自のアルゴリズムにより歩行状態が「推進力」「左右バランス」「歩行リズム」の3点から分析され、合わせて「歩幅」や「歩速」も測定ができる。
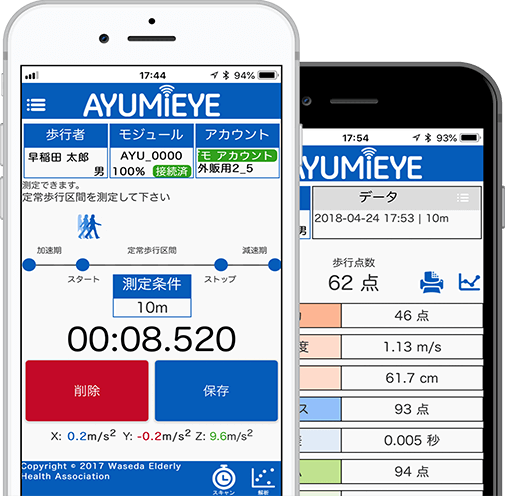
画像提供元:AYUMI EYE (運営:株式会社早稲田エルダリーヘルス事業団)
この分析結果は専用のiPad(iPhone)アプリで解析され、点数・マップ形式でスコア表示される。以前の結果と比較することで、機能訓練の成果が目に見える形で分かり、「歩きたい」というモチベーション向上に結びつけられるのが『AYUMI EYE』の大きな特色だ。

画像提供元:AYUMI EYE (運営:株式会社早稲田エルダリーヘルス事業団)
また従来、非常に複雑で時間がかかっていた体力測定が簡略化され、利用者やその家族が分かりやすい形で結果を伝えられるため、負担がかかりがちな介護スタッフの業務改善にもつながっている。
「AYUMI EYE」の開発を手掛けた早稲田エルダリーヘルス事業団が運営するデイサービス事業所「早稲田イーライフ」ほか、大学病院などの医療機関や自治体の地域支援事業など、導入事例も増加中。
これからより一層、介護の現場でテクノロジーの活用が求められることになりそうだ。
[TOP動画引用元: https://youtu.be/T-3G2XZQoO0]












 2025年には世界がまだ見たことのない超高齢化社会に突入する日本。健常者にとっても、高齢化は避けられない。高齢者の多くが抱える問題に、足腰が弱ることが挙げられるが、となれば、歩くことに困難さを抱えるのは障がい者だけではなくなるだろう。なにがマイノリティーで、なにがマジョリティーなのか、マイノリティーとマジョリティーはいつ逆転してもおかしくない時代を迎えようとしている。福祉機器はより身近に、そしてファッショナブルなものへと進化を遂げはじめている。こうした福祉機器の開発や、建造物や公道などにより、物理的なバリアはなくなりつつあるが、障がい者や福祉そのものに対する「心のバリア」はまだまだ高い。このバリアをどこまで取り払うことができるかが「超福祉展」の挑戦だ。「カッコイイ」福祉機器をあなたはいくつ見つけられるか。思わず唸るデザイン性に優れたアイテムたちにぜひ会いにいってもらいたい。
2025年には世界がまだ見たことのない超高齢化社会に突入する日本。健常者にとっても、高齢化は避けられない。高齢者の多くが抱える問題に、足腰が弱ることが挙げられるが、となれば、歩くことに困難さを抱えるのは障がい者だけではなくなるだろう。なにがマイノリティーで、なにがマジョリティーなのか、マイノリティーとマジョリティーはいつ逆転してもおかしくない時代を迎えようとしている。福祉機器はより身近に、そしてファッショナブルなものへと進化を遂げはじめている。こうした福祉機器の開発や、建造物や公道などにより、物理的なバリアはなくなりつつあるが、障がい者や福祉そのものに対する「心のバリア」はまだまだ高い。このバリアをどこまで取り払うことができるかが「超福祉展」の挑戦だ。「カッコイイ」福祉機器をあなたはいくつ見つけられるか。思わず唸るデザイン性に優れたアイテムたちにぜひ会いにいってもらいたい。




























