近年、次世代電動型車いす「WHILL(ウィル)」などが世界から注目を集めているが、それは、車いす=ハンディキャップを補完する乗り物という価値観が少しずつ変化してきた現れなのかもしれない。とりわけ超高齢化が進む日本では、パーソナルモビリティとしての役割を果たす、新たな車いすの登場を待ち望む声が高まっているように感じる。では、これからの時代にフィットする車いすとはどんなものなのか? その答えを探るべく、手動車いすの発展と意匠に関する研究でも知られる山内閑子氏(フランスベッド株式会社)に、お話を伺った。車いすの歴史を振り返りながら、これからの “車いす像” を追った。
車いすのデザインは
市場の独占で足踏み状態が続いた
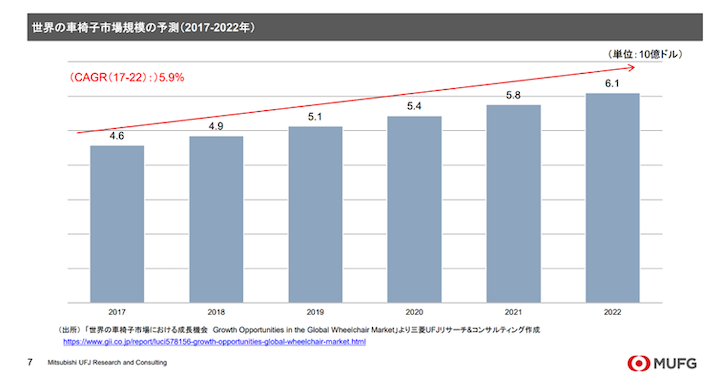
近年街中でも見かける機会の多くなった車いす。事故や病気により自らの足を使っての移動が難しくなった人々の生活を支援するための福祉用具として用いられてきた車いすだが、昨今の高齢化の影響で加齢による衰えで歩行が難しくなった人々が利用するケースも増えている。車いすユーザー数を調べた以下の図を見ても、微増傾向が続いている。需要が増えれば開発が促進されるというのはモノづくりの前提だが、果たして車いすの進化は起きるのだろうか。
この問いに「今がその時」と話すのはフランスベット株式会社で車いす開発にも関わる山内閑子氏だ。車いすの長い歴史から紐解いてみると、19世紀後半まで専門業者が存在せず、大工や家具屋、馬車屋といった職人が必要に応じて作っていたことがわかる。それゆえ、かつては現在の車いすの役割を果たすものは、様々な姿形をしていた。日本で最も古い(今でいう車いすのように使われた)ものは、一遍上人絵伝(1299年)に描かれた「土車」だという。そしてヨーロッパでは、手押し一輪車が使われた。いわゆる運搬用具が転用されていたのだ。
「かつては、身近にあった道具を転用、代用していたわけですが、それは、専業の会社が成立して量産化されるまで続きます。大きな転機になったのは、アメリカの南北戦争。負傷兵のニーズが高まり、車いすの製造台数が増えたのです。それで1870年代には、産業化へと繋がる道筋ができていきました。その後、本格的に産業化されたのは、アメリカで1937年にE&J社が作った4輪ボックスタイプからです。それまでは、木製で重いものが主流でしたが、これは鉄パイプ製で、キャンバス地をパイプの間に渡し折り畳める画期的なものでした」
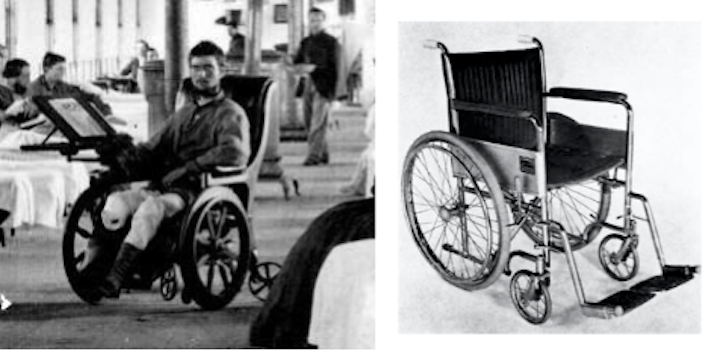
左が南北戦争時代の車いす。右が、1937年にE&J社が発売した4輪ボックスタイプの車いす。
炭鉱の落盤事故で脊髄損傷したエベレスト氏とその友人であったジェニングス氏が、自分たちの乗りたい車いすを作りたいと思い立ち、ガレージを作業場にして、全く新しい車いすを作ったのだった。そして自分たちの頭文字(E&J)の会社を興すと、車いすの歴史のなかで最も大きなターニングポイントとなる初代モデルを発表し、それを量産化した。軽量で携帯性にすぐれたその車いすは大きな成功を収め、1943年までにE&J社はトップメーカーの地位を確立した。ただ、その成功は、皮肉にも車いすの進化を停滞させることになる。
「彼らが作り上げた4輪ボックスタイプの車いすは、非常に完成度が高く、今も病院で見かけるものの原型のひとつです。E&J社は市場を独占し、一時は北米、イギリス、ドイツでのシェアが90%を超えました。しかし、ダンピング体制による技術発展の阻害が独占禁止法にふれ、1979年に約40年の独占状態が解除されました。様々なデザインがまた生まれ始めたのは、その後から。それに寄与したのが、スポーツ好きで、アクティブなライフスタイルを求めた人たちです」

山内氏いわく、「車いすユーザーが自分たちの好きなデザインを積極的に求められる機運が高まったのは、1980年代になってから」。
ステレオタイプな “車いす像” は、長きに渡る市場の独占と、それに終始して新たなデザインを追求しなかった保守的な哲学で生まれたのかもしれない。ただ、その独占状態が解除された1970年代後半〜1980年代には、“スポーツ” を軸に、軽くて動きやすく、しかもスタイリッシュな車いすが、アメリカを中心に続々と登場していった。まさにカウンターカルチャーである。
スポーツを軸に始まった
車いすのデザイン改革
「最もユニークで印象的なもののひとつが、ジェフ・ミネブレイカー氏が作った “クアドラ” です。彼は、ロサンゼルスの郊外でレクレーション療法士をしていたのですが、車いすでもアクロバットな動きやダンスができるようにしたい、という発想から、軽量化と操作性を追求した車いすを作りました。商品化されたのは1977年。これも非常に画期的で、その後1980年代に続々と生まれるスポーツタイプ車いすの礎となりました。
こういう自由な発想で車いすをデザインしよう、自分たちの乗りたいものを作ろうという動きは、それから活発化するわけですが、その根底には、1950〜1960年代に、アメリカで起こった公民権運動があります。自立した生活を自分たちで獲得していくという意識が大きく反映されているのだと思います」
自分たちのライフスタイルは自分たちで獲得するという社会的な意識の高まりは、車いすの新たなデザインや発想にも直結している。1981年には、ハングライダーの事故で脊髄損傷をしたマリリン・ハミルトンが開発した “クイッキー” が発売されたが、こちらは、女性らしい丸みのあるフレームや華やかなカラーバリエーションが特徴的だった。
さらに1989年には、スウェーデンのヤッレ・ユングネルが開発し、発売した超軽量フレームの “パンテーラ” と続き、それまでボックス型で無味乾燥だった車いすのイメージは、少しずつ変化することになる。その流れは、1980年代末にようやく日本にも飛び火する。
「日本では、東芝のデザイナーだった川崎和男氏が、『スニーカーのような車いす』をコンセプトに作った “カーナ” が、ファッション性を高めた最初のプロダクトと言えます。事故で脊髄損傷し車いすに乗っている自分の姿をショウウィンドウで見た川崎氏が、ショックを受けたことをきっかけにデザインに乗り出したそうですが、モダンな意匠が世界的にも注目され、現在はMOMAのパーマネントコレクションに収蔵されています」

多くの車いす開発にも携わってきた山内氏。いま最先端で気になるプロダクトは、さいとう工房が手掛けるREL(レル)とのことhttp://www.saitokobo.com/product/
「ロボティクスを使ったこれまでにない動きを可能にしています」。
“カーナ” に続き、1990年代以降、日本でも自由なデザイン性、高い操作性を持つ車いすは次々と生まれることになる。現在では、あらゆる分野で日本製の車いすは注目を浴びるようになったが、デザインという視点で、山内氏がもっとも注目しているのが、横浜の会社ムーヴが手掛ける “ラリー” だ。
「プロダクトデザイナーの廣川弘道さんが、2005年に手掛けたものですが、プロダクトそのものだけではなく、“人が座った時に美しく見える” 人間の尊厳を乗せる車いすというコンセプトが、当時としては画期的でした。それまでは、車いすに対してそういう考え方に出会ったことがなかったので、かなり新鮮に感じたのを覚えています。女性が座った時、座り姿が綺麗に見える佇まいに魅せられましたね」
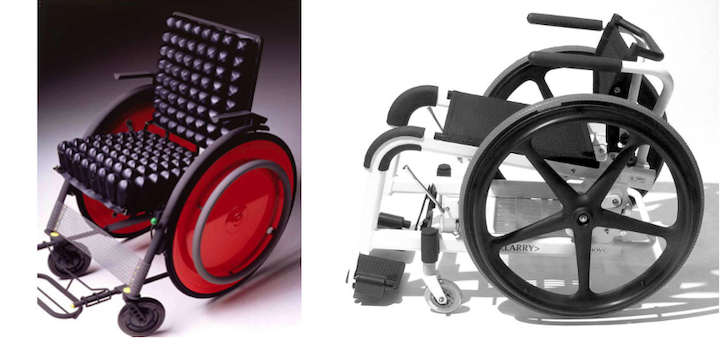
左は、川崎和男氏が自ら設計・デザインを手がけた “カーナ”。右が、プロダクトデザイナー、廣川弘道氏による “ラリー”。どちらも日本の車いすのデザインの流れを変えた。
これから、ようやく
車いすの本当の進化の時代が始まる
山内氏が、現フランスベッド株式会社に入社したのは、“ラリー” が発売された後の2008年。自らもシニア向けの車いす “nomoca” を開発した。その際は、介護保険レンタル対応ということもあり、車いすを単なる移動手段と捉えるのではなく、“居心地のいい空間”として感じられるものを目指したという。
「ユーザーが散歩に行って休んだ際に、ホッとできるようなスペースでありたいというのが、自分が “nomoca” で描いたコンセプトでした。ユーザーを包み込むようなイメージでフレームも丸みのあるデザインにしましたし、好きな色を選べるように4パターンのカラー展開を用意しました。しかも着物のように花をあしらった地模様が入ったシートがポイントです。シニアユーザーの場合、介護されるご家族が車いすを選ばれることが多いのですが、“nomoca” をショウルームで見たシニアユーザーが、“この赤い車いすに乗って出かけたい” と言ってレンタルされたことがその後の自分の開発の原動力にもなっています」

山内氏が開発し、2010年に発売されたシニア向け車いす “nomoca”。
“ラリー” しかり “nomoca” しかり、長い変遷を経て、車いすは、ここ日本でも乗る人が自ら気に入ったものを選び、それに乗ったときのイメージを自由に思い描きながらワクワクする段階まで、ようやく来たのだ。先に述べた「WHILL」も含め、次世代の電動車いすの発展も注目されるが、山内氏は、これから先の10年が、本当の意味で車いすが進化する時代だと見ている。
「ユーザーがどんな方で何を求めるかにもよりますが、日本でも車いすのデザイン性は2000年代以降進化してきたと思います。現在は、AIやIoT化、ロボティクスなども浸透し、これから先が、ようやく各々の技術が結実していくタイミングだと思っています。ただ、とかく注目されがちなのが華やかな技術やデザインですが、車いすで重要なのは、乗る人が快適でサポートする側も使いやすい生活の道具であること。座った時の身体へのフィット感や、介助ブレーキの握りさすさ、そういったディテールまで、行き届いた物づくりが求められるのは、これからも変わらないと思います。加えて、流通やサービスとしても、良い物がユーザーにしっかり届く仕組みを作っていく必要性があると感じています」
山内閑子(やまうち・のどか)
2001年、武蔵野美術大学造形学部建築学科卒業、2003年、早稲田大学大学院修士課程理工学研究科建築学専攻修了。2012年、武蔵野美術大学大学院博士 [ 後期 ] 課程 博士(造形)取得。2008年、フランスベッドメディカルサービス(現フランスベッド)株式会社入社。メディカル事業本部主任として、シニア向け車いす “nomoca” をはじめ、セーフティブレーキ付き車いす、赤ちゃん型コミュニケーションロボット “たあたん”、ウェイテッドHugふとんほか、多くのプロダクト開発に携わる。