目次
自動運転技術や各種最先端技術を駆使しながら、「よりラクチンに」「より便利に」移動できる未来がやってくる。しかし、それを本当に必要とするのはどんな人なのだろうか? ここでは、芝浦工業大学の伊東教授に話を伺いながら、「モビリティ」という概念が生まれた背景とともに、この技術によって解決すべき本質的な問題は何かを探っていく。
モビリティで移動はさらに便利になる
2018年1月、米国ラスベガスでおこなわれた『CES 2018』にて、トヨタ自動車の豊田章男社長が「モビリティ・カンパニーへと変革する」と宣言をおこなった。以来、広く一般にも注目されることとなった「モビリティ」なるワード。本来は「移動性」や「流動性」といった広義の英単語だが、いまや「未来の移動手段」といった意味合いで使われることが多い。
さらに、日本政府も「未来投資戦略2018」のなかで「MaaS(Mobility as a Service)」の推進を重点分野に掲げた。マース(MaaS)とは、鉄道やバスなどの公共交通機関、タクシー、カーシェア、サイクルシェアといった移動手段(マイカーを除く)を、シームレスに連携させていこうとする試みだ。スマホのアプリで出発地から目的地までを検索、そこで提案されたルートの予約から支払いまでも一元化していこうとしている。

「未来の移動」が変わろうとしている理由
「モビリティ」なるものがなぜ注目されるようになったのか? そこには、自動運転技術やEV自動車の進化がある。さらには、AI(人工知能)、IoT(モノのインターネット)、IoE(すべてがインターネットでつながること)といった、自動運転や各種連携をサポートする最先端技術が生まれたことも大きい。これにより、さらに「便利」な「未来の移動手段」を描くことが可能になったのだ。
「1996年、国土交通省が自動ブレーキ化を進めるプロジェクトをスタートしました。それ以前から大手メーカーは研究を進めていましたが、ここで日本企業が一斉に開発をスタートしたのです」
そう語るのは、芝浦工業大学 システム理工学部 機械制御システム学科 運転支援システム研究室の教授である伊東敏夫氏。伊東教授は、かつてダイハツ工業にて各種運転支援システムを開発してきた経歴をもつ。
芝浦工業大学 伊東敏夫教授
「ダイハツ時代は安全性の向上のため、ぶつからない車を作ることからスタートしました。自動ブレーキを完成させるためには、スロットルとブレーキ制御の技術が必要になります。さらには、センシングの技術も必要。すると、前走車に追従したり、車線に沿って走ったりと、自動運転への道が自然と開かれるようになるんです」
自動車の自動ブレーキは2010年頃から商品化がスタート。その後、自動運転機技術の向上とともに、工場の作業車やドローン、さらには家庭用掃除機に至るまで、あらゆるものを自動運転させる試みが生まれていった。
ラストワンマイル問題の
解決策は見つかるのか
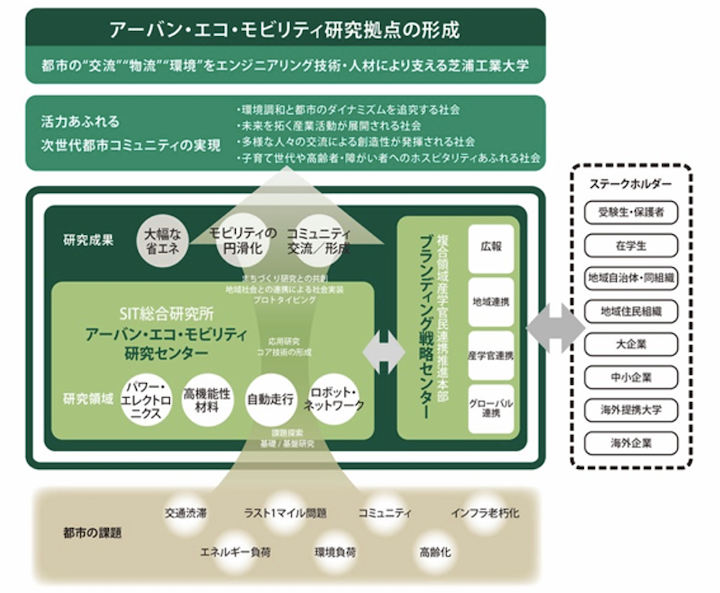
芝浦工業大学でも、「アーバン・エコ・モビリティ研究拠点の形成」という事業を2018年度よりスタート。都市を拠点とする同大学の強みを生かしながら、[都市の「交流」「物流」「環境」をエンジニアリング技術・人材により支える]という組織的なテーマを設けて研究を進めている。これは、2018年度の文部科学省市立大学研究ブランディング事業採択プロジェクトでもある。
では、都市の課題とは何か? 芝浦工業大学では、「交通渋滞」「ラストワンマイル問題」「コミュニティの喪失」「インフラの老朽化」「エネルギー負荷」「環境負荷」「高齢化」の7つを挙げている。それらを、同大学が得意とする「パワー・エレクトロニクス」「高機能性材料」「自動走行」「ロボット・ネットワーク」という4つの研究領域を駆使しながら、地域、産業界、自治体などと共に解決しようとしている。
伊東教授が率いる研究室は、「自動走行」が専門領域である。解決しようとしている都市の課題は「ラストワンマイル問題」。ラストワンマイルとは、最寄りのバス停から自宅まで、最寄り駅から病院までなど、近くの拠点から最終目的地までの区間を指す。それがなぜ「問題」なのかといえば、道が細かったり、道路が整備されていなかったり、建物内だったり、走行条件が複雑すぎて各種センシングが難しく、自動運転の実現が困難だからである。
「技術面での一番の問題はセンサーです。日々進化はしていますが、それでも数十年レベルでは人間の能力を超えることは不可能だと思います。道路に亀裂が走っていたり、崖から石が落ちてきたりなどには対応できません。そのため、周囲のインフラからサポートしてもらわないといけないわけです。つまり、自動車においては、しっかりと整備された高速道路でしか、今のところ自動運転が実現できないわけです」
首さえ振れば、上下左右360°近い環境を認識できる人間の能力はそれほどすごいのである。
本当に自動運転を求めているのは誰なのか?
「でも、自動運転を本当に必要としているのは、何らかの理由で運転ができない人ですよね? そういった方々の多くは、一般道や過疎の山道を使う人なわけです。しかし現状としては、必要としている人が少ない高速道路で、しかも高級車から導入されていく…。そこで、自動運転が一番必要な人の乗り物を考えたときに、まずは電動車いすが浮かびました。でも、そのサイズだと車体が小さすぎてバッテリーがもたない。そこで電動シニアカーに注目したわけです。どちらも法律的には歩行者扱いで免許がいらない。また、それを必要としている方々は経済的にも裕福ではないと思われるので、普及させるためには安価に自動化させる必要があるとも考えました」
伊東教授が現在進めているのは、自動運転に最低限必要な装備をボックス化して、どんなシニアカーにも「後付け」で装着できるというもの。シニアカーは幅が約60cmとコンパクトなのでビルや病院であれば部屋まで入ることができ、エレベーターにも乗ることができる。究極のラストワンマイル・モビリティなのだ。

どんなシニアカーにも後付けできるのが魅力。乗員の状況も検知するので、何か異常があれば家庭などと通信することも可能。今後は電波レーダーを歩行者に向けて照射し、非接触で心拍数を測定することで生き物かどうか、おかしな状況でないかを計測していきたいという。
「LiDARで対象物までの距離や位置、形状を検知しています。一度通った場所は覚えているので、GPSがなくても走行できます。あとは、360°の魚眼カメラで全周囲を見ています。センシングはこのふたつだけ。シニアカーはすべて手もとコントロールなので、フロントにモーターを集中させると人間の手のように制御できるんですよ」
ラストワンマイルにこそ
人間らしさがある
伊東教授の研究室は埼玉県の大宮キャンパスにあるが、実証実験は東京都の豊洲キャンパスでおこなっている。
「歩行者との共存がテーマですから、人通りの多い豊洲のほうが理想の環境に近い。また、近隣ビルの協力が得られたので、校舎をスタートして信号のある歩道を通り、ビルに入って校舎に戻るという実験をしています。問題は、人通りが多いと常にセンサーが働いて動けなくなってしまうということ。今後のテーマは、AI学習によって人の挙動を研究することです」

自動車でもなし得ていない、インフラを使わない単体での自動走行。さらに、人の往来が多いほど、安全のために停止し続けてしまうもどかしさ。ただでさえ難しいラストワンマイルのなかでも、歩道の走行は困難を極める。人間は日々、阿吽の呼吸を使いながら生活しているからだ。
一般的に「モビリティのパーソナライズ化」と言うと、身体特性や趣味趣向に合わせたハードウェアのカスタムに目が行きがちだ。しかし、それ以前に「自分の行きたい場所に行ける」という「パーソナルな欲求」を解決することが必要となる。小さな子どもが、なんでも自分ひとりでやりたがるように、自分ひとりで何かを成し遂げる達成感は幸福の原点にある。「ひとりで、会いたい人に会える」「ひとりで、行きたいところに行ける」。パーソナルなモビリティはそんな「純粋な思い」を叶えるものであることを忘れてはいけない。「未来の移動手段」は真のダイバーシティを実現することにある。