“機能とデザインの一体化”を標榜し、未来のためのロボット開発を行うfuRo(千葉工業大学・未来ロボット技術研究センター)。実は今秋、世界から注目を集めるこの研究所と、編集長・杉原が代表を務めるRDSとの念願のコラボプロダクト「SS01」が発表となった。技術面の核になったのは、日本を代表するロボットクリエイターの一人、fuRo所長、古田貴之氏。シーティングポジションの最適化を測るプロダクト「SS01」は、単なるシミュレーターではない。その理由と同プロジェクトが生まれた背景、そしてポジティブな社会を実現するために必要な視点について、杉原と古田氏が語り合った。
fuRoは一緒に世界設計や
未来像が作れるチーム
杉原「僕がfuRoと出会ったのは、おそらく8年ぐらい前ですよね」
古田「何かの展示会で会ったんですよね。自分は、杉原さんと出会ってショックを受けましたよ。カーボンでこんなことできるんですか? って思える知らない世界を見せてくれたので。いやー、カーボンやってなくてよかったなって思いましたよ(笑)」
杉原「今まで色々とプロジェクトをご一緒させて頂いていますが、僕は、いつかは自分たち側から発信したもので、fuRoの皆さんと何かをやらせていただきたいとずっと思っていたんです。それが今回、やっと実現しました。結局、8年かかりましたけど(笑)。お互いに足りてない部分を、補完ではなく拡張しながら、一緒に世界設計や未来像が作れる。fuRoは、まさにそういうチームです」
古田「嬉しいな。でも、ワクワクやドキドキが感じられるモノを作って、その先にある未来を作ろうというマインドが共有できる人は、なかなかいないですよ。技術は持てても、マインドは持てと言っても持てない。杉原さんにはそれがあるからやりやすい。別に持ち上げてるわけじゃないですよ(笑)」

古田氏(右)もfuRoもリスペクトしている杉原。コラボをしたいという思いは、8年越しで実現した。
杉原「僕も本当に嬉しいです。今回自分たちが取り組んだのは、人の体の最適解を探す計測シミュレーターですよね。例えば(古田さんが開発した)カングーロでもなんでも、乗り物の最適なポジションを見つけて、その人の身体の特徴を生かしつつシートがフィットすれば、より乗りこなしやすくなる。これからは、ビッグデータが揃って、パーソナライズの量産化が進むわけですから、今回の計測器“SS01”で得たシートの情報は、いろんなことに活かせるようになるはずですよね」
古田「もうグランドデザインも含めて、杉原さんが全部やってくれて(笑)」
杉原「いや、まったくそんなことないです(笑)。僕らができないことを、たくさん助けていただきましたから。ワントゥーテンさんとRDSで製作したCYBER WHEEL Xのときも、fuRoの皆さんには負荷装置の部分を手がけていただきましたけど、今回も自社だけやろうとすると何年もかかるものが、できない部分を拡張してもらえるチームと一緒にやることで、数ヶ月でできることがわかりました」
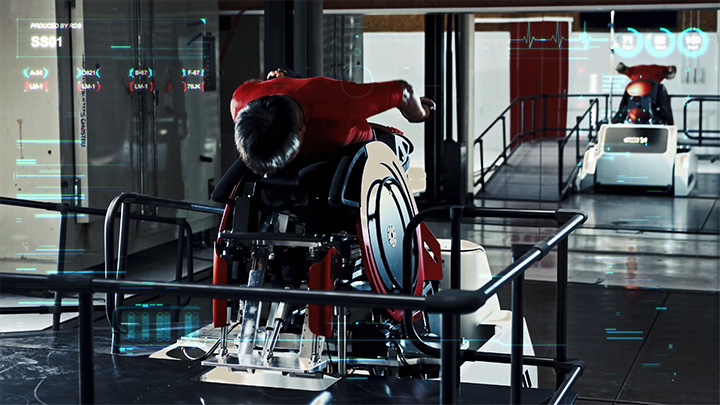
車いすレースや日常用車いす、さらにはシッティングスポーツ全般を想定して、最適なシートポジションを割り出すSS01は、ユーザーのパフォーマンスレベルを高める。
乗り物は共生社会のなかで
コミュニティを作る役割を担う
古田「それは重要だよね。チームビルドっていうのは、社内も社外もどちらも大切。でも、チームビルドするときに一番必要なのは、さっきも言ったマインドが同じということ」
杉原「僕は、古田さんはチームビルディングが最高にうまいなって思っていますけど」
古田「いや、才能のある優秀な人が周りにいてくれるだけですよ(笑)。僕はのび太くんで、周りにドラえもんがたくさんいるってことです。たった一人でできることなんて微々たるもの。どうやってその分野で振り切ってる人と繋がって、コラボレーションすることで1+1を3以上にするか。それが大切なことですね」

杉原「自分もそう思います。今回の計測器もそうやってできたもののひとつです。そういえば、いま時速50km出る車いす型モビリティを開発していて、これから原付登録をしようと考えているんですね。車いすとしての機能も搭載され、おじいちゃん、おばあちゃんはもちろん、老若男女誰もが乗れて、しかも使って楽しいモビリティって面白いと思いませんか?」
古田「そういう発想は面白いですね。確立された技術ができたら、それは今度大衆に向かっていく。そして、ちょっと面倒くさい言い方ですけど、能動的共生社会に繋がっていく。イヴァン・イリイチという社会学者が、コンヴィヴィアリティという思想を唱えましたけど、どの世代もワイワイ賑やかにやっていける社会を作るということですよね。乗り物もそういうコミュニティを作るひとつの役割を担うと思うんですよ」
杉原「なるほど。自分はよく“自分ごと化”って言っているんですけど、そういう能動的共生社会で一番大事なことって、周りで起きている様々なことを、いかに自分のことのように考えられるかということですね」
古田「いいこと言いますね! そういうふうに、いろんな人や世代が能動的に共生していける社会は、いろんなサービスや技術が必要ですよね。でも、例えば乗り物も、単に移動手段ではなくて、ウキウキ、ドキドキするようなものであるべきなんですよ。その乗り物があるから、外に行きたいなぁとか、乗って走って誰かに会いに行きたいなぁとか思って外に出るようになって、気がつけば友達ができて生活が楽しくなったなぁとか。そうやって人を突き動かす技術やサービスは、結果、社会を変えていくんですよ」
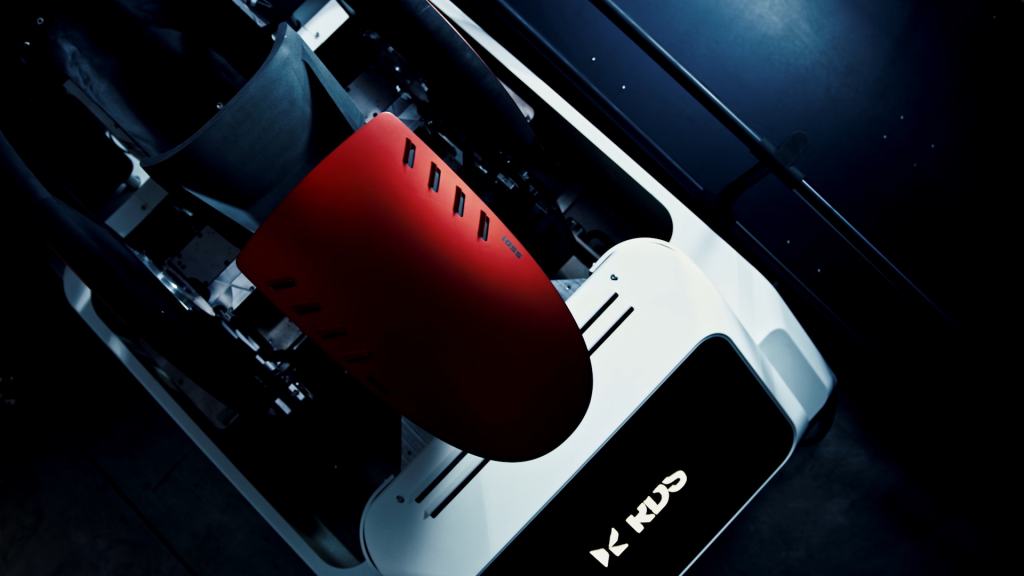
SS01は単なるシミュレーターにあらず。デザイン性の高さにも力点が置かれている。
SS01紹介サイト:http://rds-pr.com/ss01/
シーティングポジションのデータが
面白いことに繋がる未来が来る
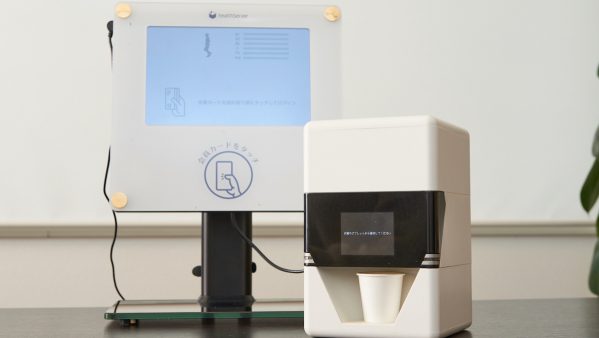
杉原「確かにそうですね。今回のSS01という測定器ですが、“そんなものが必要なの?”とか、“無意味じゃない?”という人もいるんですね。でも僕は、絶対にこのような技術が必要な未来が、すぐにやってくると言っているんです。これから来る未来と社会に繋がっていると。今後は、国立障害者リハビリテーションセンター研究所とともに、SS01を使って多くのシーティングデータの集積を行いつつ、解析設計をしていく方針です」
古田「へー! それはすごいですね。さらに先の未来に繋がっていきそうですね」

杉原「体がどういう状態の人には、どういうシーティングポジションが最適なのか? それだけのデータを取るというのは、これまで共有されなかったことです。その一歩としても面白いじゃないですか。その先に、何か素敵なエンタテインメントが繋がっているかもしれないですし」
古田「ウキウキするようなことが、見えてくるかもしれないってことですね」
古田貴之(ふるた・たかゆき)
1968年、東京生まれ。工学博士、fuRo(千葉工業大学未来ロボット技術研究センター)所長。青山学院大学大学院理工学研究科機械工学専攻博士後期課程中退後、同大学理工学部機械工学科助手を経て、2000年、博士(工学)取得。同年、国立研究開発法人科学技術振興機構で、ロボット開発のグループリーダーとしてヒューマーノイドロボットの開発に従事。2003年より現職。自動車技術とロボット技術を融合させた「ハルキゼニア01」、大型二足歩行ロボット「コア」、搭乗型変形ロボット「カングーロ」ほか、世界から注目を浴びる開発プロダクトは数知れず。著書に『不可能は、可能になる』(PHP出版)がある。