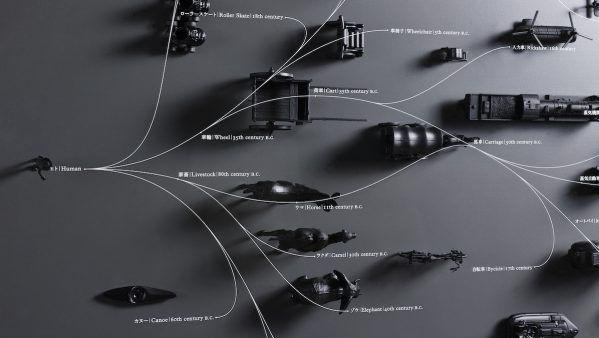
世界中の自動車業界、交通サービス業界に新しい波が巻き起こっている。『MaaS(マース)』=Mobility as a Service、すなわち「サービスとしてのモビリティ」は2019年、ビジネスにおける最重要キーワードのひとつとなることは確実だ。
国土交通政策研究所によると、MaaS とは、ICT を活用して交通をクラウド化し、マイカー以外のすべての交通手段によるモビリティ(移動)を ひとつのサービスとしてとらえ、シームレスにつなぐ新たな「移動」の概念を指す。交通手段やルートの検索、運賃の決済に至るまでスマートフォンの専用アプリで完結するものが主である。
MaaSの事例として最も認知度が高いと思われるのが、自動車配車プラットフォーム『Uber (ウーバー)』。日本では法規制のため、まだ広く浸透はしていないが、タクシーをしのぐ勢いで市場のシェアを獲得している国もあるほどだ。乗車する前からルートや料金が明確になっている、乗車後にドライバーに評価をつけられるなど、アプリの手軽さや利便性がウケているまさに MaaS の代表格。
Uber のほか、東南アジア諸国での最大手である Grab 、欧州で支持を受ける Gett など競合サービスも世界中で拡大している。私たちの生活にかなり身近になってきたカーシェア、バイクシェアも MaaS のひとつ。最短30分から利用できるサービスが多く、シェアリングエコノミーの筆頭として成長を続けている市場だ。
また、注目を集めるのは、「CREW」「nori-na」のようなライドシェアサービス。誰かを「乗せたい」、誰かの車に「乗りたい」をマッチングすることで、交通の便が悪いエリアでの移動や、イベント、野外フェスなど遠方へのお出かけにも活用ができる。
このほか、現在各所で開発が進んでいる自動運転も MaaS の普及を語る上で欠かせない存在。マイカーの所有が減少傾向にあり、「車離れ」と言われる時代において、MaaS が秘める無限の可能性に期待したい。