目次
八千代工業(以下、ヤチヨ)は、樹脂製燃料タンクとサンルーフを主とした自動車部品の研究開発・製造・販売と、自動車の受託生産を主要事業とする企業。その名が、自動車とは異なるパラスポーツの世界で人々の耳目に触れるようになった一つの大きなきっかけは、2014年10月より同社に所属する車いすマラソン女子の第一人者・土田和歌子選手の存在。これまで夏季と冬季を合わせてパラリンピック7大会に出場し、夏冬の両大会で金メダルを獲得するという日本人初の偉業を成し遂げたレジェンドだ。そんな土田選手が惚れ込んだのが、ヤチヨが、ホンダR&D太陽株式会社(ホンダR&D太陽)と株式会社本田技術研究所(以下、本田技術研究所)と三社共創で開発する“レーサー”こと、陸上競技用車いす。開発の裏側を探るべく、同社開発本部生産技術部新商品技術ブロックリーダーの柴崎博文氏に話を伺った。
自動車部品と自動車生産の
エキスパートが展開する多彩な事業

今年、創業65年目を迎えたヤチヨ。激化の一途を辿る自動車業界のグローバル競争を勝ち抜くべく、部品事業ではグローバルオペレーションを進化させ、海外を中心とした事業拡大の推進に尽力するかたわら、完成車事業では、大量生産を前提とした工場にはない新たな価値を顧客に提供するために、「少量生産特殊工場」への変革を進めている。その名の通り、生産台数は少なくとも、顧客が真に必要とする自動車の生産に特化した工場だ。
さらに、長い歴史の中で培ってきた独自の技術やノウハウを活かし、LPガスをはじめ、天然ガスや水素など、さまざまなエネルギー源を貯蔵する「エネルギーストレージ」の事業展開を進めながら、自動車の軽量化や低燃費化に寄与する素材を用いた自動車部品の量産化技術の構築に力を注いできた。その素材のひとつが、近年、陸上競技用車いすにも使われているCFRP(炭素繊維強化プラスチック)だった。
陸上競技用車いすの開発を
三社共創でスタート

開発本部生産技術部新商品技術ブロックブロックリーダーの柴崎博文氏
ヤチヨが、本田技術研究所とホンダR&D太陽との三社共創で、CFRP(炭素繊維強化プラスチック)を用いた陸上競技用車いすを開発するに至った経緯について、柴崎氏はこう話す。
「“レーサー(陸上競技用車いす)をCFRPで一緒に作りませんか?”と本田技術研究所の方から、お声掛けいただいたことが全ての始まりでした。本田技術研究所が、次のジョイント先を探されていて、当社はちょうど、カーボン技術の基礎研究に着手し始めた頃でした。レーサーを造ることは、今後、社内のカーボン技術を構築していく上でも、自動車部品などの製品へCFRPを応用するための技術開発の上でも、良い機会になると思い、2012年より共同開発させていただいております」
勝ちに行くためのレーサー、
極<KIWAMI>

世界に1台。極<KIWAMI>の“土田モデル”に乗った土田和歌子選手
カーボン技術の構築と共に、障がい者スポーツの発展を目指して、“1秒でも速く”、“風をきって走る喜び”を多くのアスリートと共有したい。その理念のもと、ヤチヨが誇る「ものづくりへの飽くなきこだわり」が、本田技術研究所の「徹底した先進技術の追求」と、ホンダR&D太陽の「妥協を許さない試験評価」とみごとに融合したレーサーが完成した。
その名も、ハイエンドモデル「極<KIWAMI>」。最先端カーボン設計技術を駆使したCFRP製シートとメインフレームが一体型になったモノコック構造で、シート部分は、非接種方式の3Dスキャナーによる姿勢測定のデータを基に、3D-CADでアスリートの体のラインにぴったり合った形状を具現化。ホイールにも、軽量かつ剛性に優れたCFRPを採用することで、超軽量カーボンホイールが実現した。柴崎氏の言葉を借りるなら、これは他でもない、「勝ちに行くためのレーサー」だ。
CFRPを採用したのは、単に軽量化のためだけではない。優れた振動吸収性という特性を活かすことも、ヤチヨの狙いのひとつだった。選手によって、素材の好みの違いはあるが、路面に近い姿勢で長時間走り続ける車いすマラソン選手の場合、アルミ製メインフレームのレーサーなどに比べて、乗りやすさを直ちに実感するケースが多いという。「高い振動吸収性により疲労感が少なく、レースの最後まで力を出し切ることができる。また、自身の生み出す力が余すことなくレーサーに伝わるので、最大限のパフォーマンスが発揮できる」と土田選手が話すように、選手の体の動きに合わせた、最適なしなりやねじりを実現している。優れた走行性能はもちろん、極めてしなやかな乗り心地も兼ね備えたマシンなのだ。
全力で勝ちに行く選手に、
全力で応える

レーサーの中でも、選手の体に密着するシートは、パフォーマンスを左右する重要な部分。既存のレーサーに、ホイールを漕ぐ時のベストポジションで乗った状態で3Dスキャナーにかけ、取得した3Dデータを基に、シートの形状を3Dモデルで設計する。その強度と剛性を構造解析で確認したのち、ようやく石膏で型を造る段階に入っていく。というように、世界に1つのオーダーメード・シートは、気が遠くなるほどの細かなプロセスを踏みながら、少しずつ形になっていく。
その過程において、ヤチヨの技術者たちには、開発と同様に重要な役目がもうひとつある。それは、全力で勝ちに行く選手の要望に応えるために、密なコミュニケーションを取ること。土田選手の場合、開発チームの作業場の一角に室内練習機が常設してあり、数ミリ単位の細かなポジションの調整などの要望をマシンにフィードバックできる体制が整っている。

土田選手が、リオパラリンピックで使用した極<KIWAMI>
1位とわずか1秒差で、惜しくも4位に終わったリオパラリンピックも、2年連続11度目の優勝を果たした2017年12月のJALホノルルマラソンも、土田選手の体と一体化し、ロードレースを共に疾走したレーサー、極<KIWAMI>。ヤチヨが土田選手のために開発したレーサーは、現在5台目。1台の価格は200万円を超え、誰もが容易に手に入れることができるものではないが、米国やシンガポール、南アフリカなど、“最速”を求める海外選手からの注文も増えているという。
「海外選手の場合も、当社までお越しいただき、ここで(3Dスキャナーによる姿勢データを)計測して、ここで造ります。調整については、マニュアル的なものをお渡ししていますが、メールなどでもサポート対応させていただいています」
ハイブリッドレーサー、
挑<IDOMI>の魅力

優れた振動吸収性を持つCFRPはメインフレームだけに使っても、その効果を発揮する。スタンダードモデル「挑<IDOMI>」は、ハイエンドモデル極<KIWAMI>と同じ設計思想に基づき、CFRPのメインフレームにアルミ合金製のシートを組み合わせたハイブリッドレーサー。好みによって、振動減衰素材を積層が可能で、乗り心地や走行性能をさらに向上することも可能だ。なお、極<KIWAMI>と同等のたわみ特性も実現されており、ボルトで締結する分割構造により、フレームとシートは、着脱可能になっている。
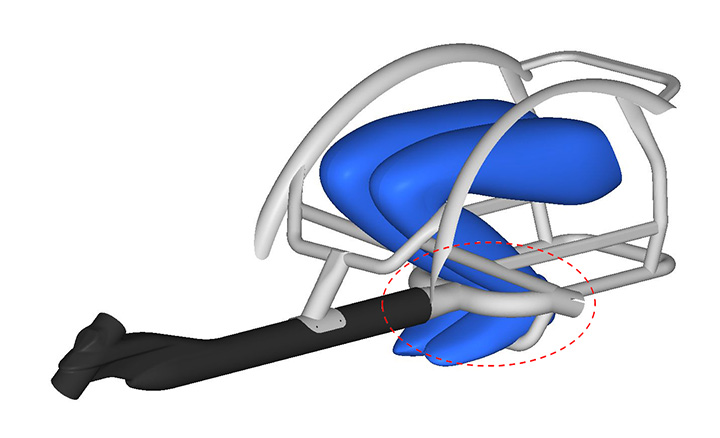
Uフレーム
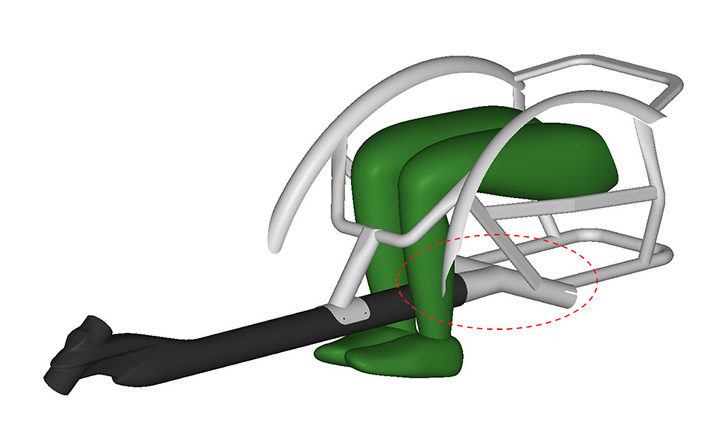
Tフレーム
「挑<IDOMI>は、車いす陸上をスポーツとして楽しみたいという人をはじめ、色々な方に乗っていただけるレーサーです。もちろん、極<KIWAMI>のように勝ちに行くことも可能です。基本的には、足を折りたたんだ正座の姿勢で乗る設計ですが、乗り方の好みによって選べるUフレームとTフレームの2つのシートフレームをご用意しています」
後編では、ヤチヨのモノづくりの現場を紹介する。
八千代工業株式会社
http://www.yachiyo-ind.co.jp/