目次
先端医療が進むアメリカで、手術支援ロボット「ダビンチ」が発売されたのが1990年。以来「ダビンチ」は圧倒的シェアを占めており、ここ日本においても同製品の最新版が導入されてきた。手術支援ロボットの開発で遅れをとった日本で、株式会社メディカロイドが2020年12月国産の手術支援ロボット「hinotori(ヒノトリ)」の販売を開始した。同社の社長・浅野 薫氏にお話をうかがった。
日本初の国産の量産医療用ロボットの
開発・製造を行う
杉原:まず、御社について教えてください。
浅野:メディカロイドは川崎重工業と、医療分野の検査機器の研究・開発を主とするシスメックス社が、国産の医療用ロボットの開発・製造を目指して設立した会社です。日本の医療技術を神戸からグローバル社会に発信しようということで、メディカロイドも設立から現在に至るまで神戸を拠点としています。
杉原:神戸は医療系産業が盛んな印象があります。背景となるプラットフォームがあるのでしょうか。
浅野:1995年の阪神淡路大震災以降、神戸市のポートアイランドでは震災復興のプロジェクトとして、医療産業の誘致を行っているんです。そのなかに私たちの会社があり、周辺の病院など医療機関との連携も密に行っています。
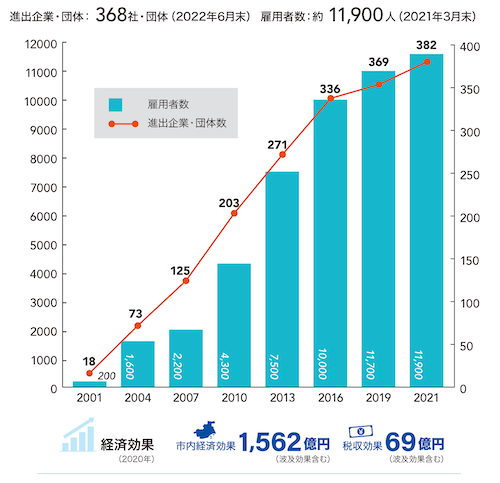
神戸医療産業都市への進出企業推移(https://www.fbri-kobe.org/kbic/about/)
杉原:浅野さんは、どのようにシスメックス設立と医療ロボット開発にかかわるようになったのでしょうか。
浅野:大学院を卒業してから川崎重工業で、4年半ほどロボット開発に携わっていました。その後1987年に東亞医用電子(現シスメックス)に入社しています。2012年に当時の同僚であり、現在の川崎重工業のトップである橋本から「一緒になにか新しいことをやりたい」という話をもちかけられて意気投合したんです。
ちょうどその時、シスメックスと川崎重工業の社長同士も「医療用ロボットを作りたい」という話が出ていたようで、私と川崎重工業の橋本康彦(現・同社代表取締役社長執行役員)を中心に、メディカロイドの前身となる「医療用ロボット研究会」を2012年に発足しました。
杉原:あとから聞くと必然のようですが、お互いの企業の社員同士とトップ同士が違う場所で意気投合していたとは! 偶然というか奇跡ですね。
浅野:これはもう運命だと思いましたね。両親会社に出資をしてもらってメディカロイドを2013年に設立。2015年から手術支援ロボットの開発をスタートしました。
人間の腕に近いなめらかな動きを実現。
12兆回のシミュレーションを実施
杉原:「hinotori」の強みはどの点にあるのでしょうか。
浅野:産業ロボットの開発・製造で日本を支えてきた川崎重工の技術の粋をつぎ込んだ製品となっていて、一つは「干渉低減」が挙げられます。オペレーションアームは8軸(アーム部分が7軸+冗長軸)で構成されていて、人の腕のようになめらかに動くため、手術をしている時にアーム同士がぶつかるのを防ぐことができます。これが干渉低減です。
杉原:人間の腕は7軸ですから、やはり人のように動かすには7軸構造が必要ということなのでしょうか。
浅野:6軸だと答えは1つに決まる、つまり動きが一つに限定されますが、7軸にすることで答えは不定になるんです。つまり、いろいろな姿勢がとれるようになります。例えば、一つのアームを肘と仮定すると、もう一方の肘とぶつかりそうになったときに肘をつかって避けられるということです。7軸に加えもう1つ冗長軸もあるのでさらに不定解が広がり、それはもういろいろなことができます。これについては川崎重工のエンジニアが12兆回のシミュレーションしています。
杉原:12兆回ですか!
浅野:もっというと、実はアームにとりつける手術鉗子も4軸の自由度をもってるので、実質的には12軸。それが4本あるので48軸となり、さらにそれを支えている本体も動きます。
医師の負担を軽減する
「サージョンコックピット」
杉原:ドッキングフリーのデザインというのもポイントですね。
浅野:はい。「hinotori」は動作支点をソフトウェアで制御してるので、アームとトロッカーとのドッキングが不要なんです。それをドッキングフリーと呼んでいます。手術ではメインの執刀医の他に助手の医師がいて、トロッカーと呼ばれる管を使って、手術中に血液などを吸引します。ドッキングの機械があると、そのためのスペースを奪ってしまうのです。省スペースを実現したことで手術がしやすくなります。
杉原:なるほど。ドクターの負担軽減のために人間工学に基づいた設計もされていますね。これは長時間の手術も想定してということでしょうか。
浅野:はい。サージョンコックピットといって、2~3時間、あるいはそれ以上の手術での首の凝りや疲労感などを軽減できるよう、自由度の高い設計をしました。

神戸大学で行なわれた「hinotori」を使った初めての手術の様子(写真提供:神戸大学)
杉原:ドクターをパイロットと言っていましたが、どれくらいのトレーニング期間が必要ですか?
浅野:弊社のトレーニング部門が安全にお使いいただけると判断できた際にサーティフィケートを発行しておりますが、手術支援ロボットをお使いになったことのない方でだいたい平均1カ月くらいです。すでに手術支援ロボットを使った経験のある医師の方なら、1日から2日で同じように使えるようになります。
杉原:「hinotori」は全国何カ所くらいに導入されてどのような手術に使われているのですか。
浅野:現在は20施設ほどで稼働しています。東京が多いですが、名古屋や関西でも導入されていて、今年度中に全国に広がっていく予定です。手術の種類としては、現時点では泌尿器科のみで承認を受けておりますので前立腺・腎臓などのがんの摘出が多いですね。手術支援ロボットはグローバルにみると、といってもほとんどがアメリカですが、消化器科、婦人科、呼吸器科などにも手術用ロボットの適応が広がっています。
医療データの集積とデジタル化で、
「神の手」を再現するトレーニングも視野に
杉原:「hinotori」は、人機一体を考えたプロダクトだと思いますが、その点はどうですか。
浅野:そうですね。結局機械が自律的に動くことはなく、ドクターの操作どおりにアームが動くので、執刀医の先生と一体になった操作性は非常に重要です。
また、医師によって同じ手術をするにしても時間が違ってきます。“神の手”と称されるようなドクターの手の動きは、無駄がなく効率的です。その動きを蓄積してデータ化し、そこからベストプラクティスを抽出することができれば、機械と人が一体になったトレーニングもできるようになると考えています。
杉原:なるほど。“神の手”などのノウハウや能力をデジタル化し、ゆくゆくはニューラルネットワークのように販売することも考えているのですか。
浅野:まずはオートパイロットではなく、ごく一部のところで自動化して、医師にとって専門的な作業に集中できるような貢献がしたいと考えております。期待されているのは遠隔手術の支援です。手術するロボットの近くに主治医がいて、手術の難所となるところの指導をリモートで行うのが最初の段階で、これは近い将来に実現可能だと思います。
杉原:世の中がそれを受け入れたり、そのための制度を変えていくことに時間がかかると思うのですが、浅野さんはどのようなことが障壁になると思いますか。
浅野:十分な通信インフラをリーズナブルに使える環境が整うことが、普及に向けた第一条件ですね。たとえば5Gにしても専用回線を使えば技術的には問題がないのですが、コスト面がネックになります。
杉原:2025年の万博でも健康がテーマにあがっていますね。それによる日本の変化で期待しているところはありますか。
浅野:はい。日本として医療機器産業は本来もっと強くなければならないと思っています。万博がトリガーとなり、健康社会に貢献できる産業として注目されることが、そのための追い風になればいいと思っています。
オープンプラットフォームで
健康寿命や未病対策に貢献
杉原:貴社ではオープンプラットフォームの体制をとっていますね。それにはどのような狙いがあるのですか。
浅野:一つは研究分野への貢献です。たとえば先程の“神の手”のノウハウのようなデータをオープンにして自由に使ってもらうことで、研究や医師の技術力向上に役立ててほしいということ。もう一つは、産業の活性化への貢献です。現場のドクターからの要望がさまざまなので、それに応えるためにもたくさんの企業とのジョイントが必要です。そこでインターフェース部分もオープンにして winwinでやっていきたいです。
杉原:健康寿命や未病対策に貢献する企業として、次のステップに向けて考えていることはありますか。
浅野:不特定多数のデータよりも、個人の時系列データが未病対策や悪化・再発予防には大切です。弊社の母体であるシスメックスが本業としている検査データは重要で、そこから集約したデータで少し先を予測して次のアクションにつなげることが可能です。同じようなことが手術支援ロボットにもいえます。手術をしたらそれで終わりではなく、組織が定着したとか、患部の取り残しがないかなど、検査による術後のフォローが必要です。検査によって時系列にケアするようなソリューションも提供していきたいと考えています。
浅野 薫(あさの・かおる)
1983年3月 大阪大学大学院工学研究科電子工学専攻卒業。1987年 東亞医用電子株式会社(現 シスメックス株式会社)入社。2017年 シスメックス株式会社 取締役 専務執行役員 CTO。2020年 株式会社メディカロイド 代表取締役社長 。2021年 株式会社メディカロイド 代表取締役社長執行役員 CEO。[業績] 平成25年度文部科学大臣表彰 科学技術賞(開発部門) 「多項目自動血球分析装置における粒子分類計数方法の開発」
関連記事を読む
- もう一度日本が世界から注目される日は来るのか?医療テックがもたらすもの
- ペットにも救急医療を。パイオニア・中村篤史獣医師の挑戦
- 自宅でも唾液1滴でがん検査! 私たちのライフスタイルを変えるバイオテクノロジー × AIの最前線
- 不妊治療も子宮頸がんも予防の時代へ 子宮内フローラが教えてくれること
(トップ画像提供:株式会社メディカロイド)