医療費負担の増額や、健康保険料の増額がニュースを騒がせている。自営業などの人が入る国民健康保険についてはこの4月から、上限額が3万円値上げされることになっている。国民健康保険料は所得や年齢、暮らしている地域により支払い額が変わる。今回の値上げが直接関係するのはだいたい年収1170万円以上の単身世帯と言われているので、数としてはそれほど多くはなさそうだ。だが、医療費負担増については別だ。75歳以上の高齢者のうち、課税所得が145万円を超えている人は3割負担になってしまった。1割増は確かに大きい。
しかし、こうした増額をしなくては、どうやら健康保険制度の維持が難しいということらしい。この制度のおかげで日本では誰でも気軽に医療機関を受診することができている。医療機関を受診する人が増えればそれだけ医療費として使われる税金も増えてしまう。そのため、健康に暮らすことは個人の暮らしや、働きを守るだけでなく、健康保険制度の維持にも関わってくる。厚生労働省では私たちの健康を増進させるための調査や研究が行なわれているのだが、手軽にできる健康維持の方法として注目されているのが運動習慣の定着だ。
健康に対する意識の高い企業の経営層の中には、自身の健康を守ることも会社経営に関係するという考えから、秘書と同じようにトレーナーをつけている人も多い。とはいえ、毎週コンスタントにトレーナーの元を訪れるのは難しいという人もいる。だが、運動は習慣化しなければ意味がない。以前、あるネットショッピング会社を取材をした時のこと、ネットショップの健康器具の売れ筋は「簡単」「気軽」というのがキーワードになるのだと広報担当者が話してくれた。この2つを備えたものだと、客が継続しやすいと感じるのか、購買欲もそそられやすく、高売り上げに繋がるという。
「簡単」「気軽」を満たす運動とは
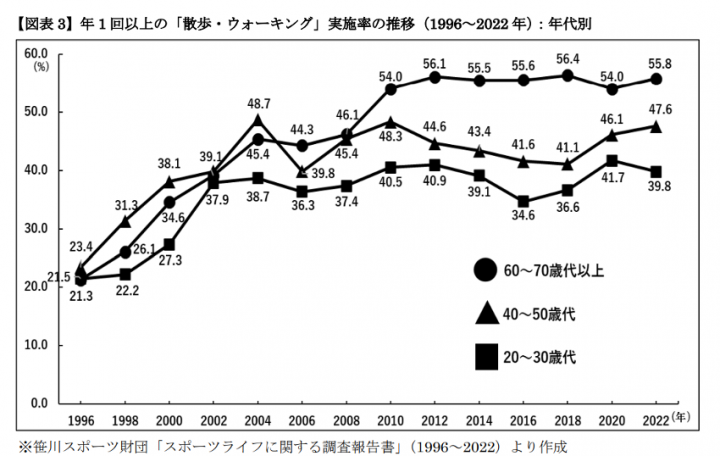
近年、「簡単」「気軽」にできる運動として日常生活に取り入れる人が増えているのがウォーキングだ。笹川財団が行なった調査(2022年)によると、週1回以上ウォーキングをする人は推計3,795 万人と、1996年の調査開始以来、過去最高を記録している。年代別では60~70歳以上の人の実施率が最も高く55.8%。次いで40~50歳代47.6%が続いている。年齢が上がるにつれて日常生活にウォーキングを取入れる人が増えていることが分かる。
そして、こうして日常的に運動をしている人は総死亡、虚血性心疾患、高血圧、糖尿病、肥満、骨粗鬆症、結腸がんなどの罹患率や死亡率が低いことも各国の調査で分かっている。最近はうつなどのメンタルを崩す人も増えているが、身体活動や運動は、メンタルヘルスにも良い。高齢者の場合はウォーキングを日常に取入れることで、寝たきりや死亡のリスクが減るとも。かくしてウォーキングは「簡単」「気軽」な運動として定着しつつあるのだ。
人々が動けば市場も動く。ウォーキング人口の増加もあってか、スポーツシューズやアパレルの売り上げが伸びているようだ。『Japan Sports Tracker』が2024年3月に発表したデータによると、国内におけるスポーツシューズ・アパレル市場の規模はコロナ禍前の数字を上回り、1.26兆円(前年比7.5%増)に。特に売り上げを伸ばしたのがスポーツシューズで、ウォーキングやサッカー、バスケットボールシューズの売り上げが上がっていた。
超手軽!ウォーキングで未病診断
人々の健康維持に役立つウォーキング。これを健康診断に役立てる動きが出始めている。その先駆けとなっているのが株式会社RDSと国立障害者リハビリテーションセンターが共同で開発した歩行解析ロボット『RDS CORE-Ler(コアラー)』だ。3Dカメラを搭載したロボットが歩行時の姿勢などを計測、得られた情報をサーバー上で保存し解析することでケガや病気の早期発見に役立てようというものだ。開発担当者によると、その人の歩き方から分かることは実は多くあるという。例えば、歩行姿勢の変化から高齢者に多い転倒リスクについて知らせることができるという。また、歩行の変化と病気との関連性についても研究を進めている。これができれば、ケガや病気の前触れを客観的に示すことができるようになるため、医療機関からの期待も高まっている。
株式会社RDSのコーポレートサイトで紹介された『RDS CORE-Ler』。
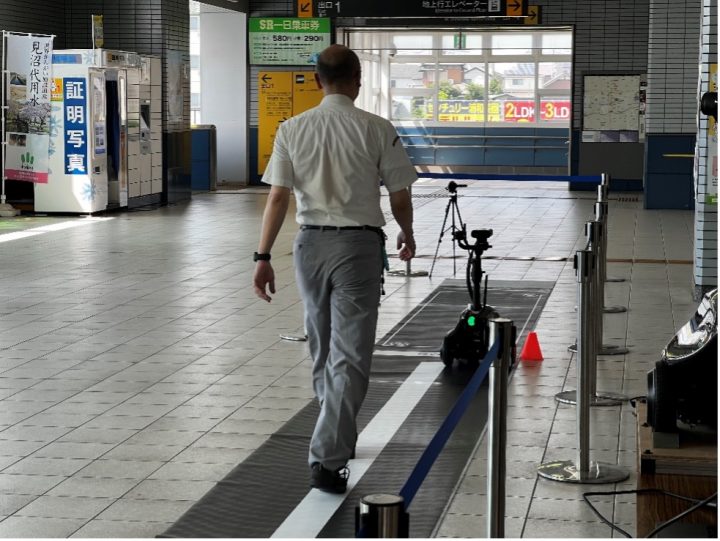
浦和美園駅構内で行なわれた埼玉高速鉄道株式会社の社員向けイベント。歩行者の前方にあるのが『RDS CORE-Ler』。
これまでも歩行を解析する装置は開発されていたものの、体の何カ所にもシール状の計測器具をつけ、モーションキャプチャーなどを使って解析するものがほとんどだった。さらに、これらの機械を揃える費用も高額で、広く一般施設への設置にはハードルが高かった。今回開発が進む『RDS CORE-Ler』は、測定のために身体に器具を装着する必要がなく、被験者はロボットの前で10メートルほど歩くだけ。器具の装着がないためか、被験者はより普段通りの歩行をすることができ、正確な解析に繋がりやすい。その上、従来の機器と比べて費用も抑えることができるという。同社はすでに南相馬市や埼玉高速鉄道株式会社、京都市で多数の病院を運営する医療法人洛和会と連携協定や包括協定を結んでいる。
埼玉高速鉄道株式会社ではRDSと連携し、すでに浦和美園駅構内で同社従業員の測定会を行なった他、浦和美園まつりで地域住民に対しての計測会を実施した。
今後両社は駅利用者等への歩行計測と並行して、駅改札通過時に自動的に歩行計測ができる普及版システムの実装に連携して取り組んでいく。実現すれば、全国初の鉄道駅でのヘルステックサービスとなる。健康診断に歩行を使った検査が導入される日は近い。
参考資料:公益財団法人 笹川スポーツ財団
https://www.ssf.or.jp/files/SSF_Release_20231129.pdf
『Japan Sports Tracker*』
https://www.npdjapan.com/press-releases/pr_20240409
厚生労働省 身体活動・運動
https://www.mhlw.go.jp/www1/topics/kenko21_11/b2.html