今年も保活戦線が始まっている。「いつになったら待機児童は解消されるのか」そんな話題が飛び交う時期だが、同時に親たちから聞かれる声は「だからといってどんな園でもいいわけじゃない」というもの。大事な子どもを預ける場所だけに、安全面には気をつけたいところ。そんな中、保育士とITのダブルチェックで赤ちゃんの午睡中の事故を防ぐ商品が発売された。株式会社global bridge HOLDINGSのグループ会社で、保育ICT事業の企画・開発・販売を行う株式会社social solutionsは、保育施設向けに乳幼児のうつぶせ寝を検知するためのお昼寝チェック体動センサー「VEVO(ヴィーボ)のセンサー」を2019年10月から販売する。同社のビジョンは実に愉快。このセンサーだけに止まらず、IT技術を使って保育現場を楽しくサポートできる仕組みを考えているようだ。イメージムービーとして公開されているのが冒頭の動画。毎朝のあの煩わしい体温計測から解放される日も近い。
保育士不足を受けて、保育現場の負担を減らす目的で開発が始まっているのはクマ型ロボットの「VEVO」。イメージ動画では「VEVO」が子どもの日常のデータを記録、成長段階に合わせた遊びや学びをサジェストすることまでが想定されていることが伺える。このイメージムービーのようなことまではできないのだが、すでにこの「VEVO」、実際の保育現場で活用が始まっているという。お迎えがきた子どもが入り口付近にいる「VEVO」にキーホルダーをかざすと「サヨウナラ。今日は〇〇を食べたね」などと会話をしてくれる。些細なことだが「VEVO」を介して親は園での出来事をしることができるのだ。
そんな「VEVO」に新たなシステムが加わった。同社がこの秋販売を始めたのが睡眠中の子どもの寝返りなどを感知するセンサー。クマ型ロボとの連動ではないものの、冒頭のイメージ映像に近づく一歩と言えそうだ。
乳児の場合、うつぶせ寝が原因で窒息死に至るケースもあり、これまでは保育士がお昼寝時間中にも頻繁に確認する必要があったのだ。
内閣府が出している資料によれば、平成 24 ~ 30 年に発生した死亡事故の報告件数は累計で98 件。睡眠中の死亡事故の中では「うつぶせ寝」は認可保育所で 6 件、認可外施設では25 件発生していた。事故防止の取り組みとして、保育士は園児の午睡中に 1 歳児では10 分に 1 回、0 歳児では 5 分に1 回子どもの様子をチェックすることが推奨されている。赤ちゃんがうつぶせになっていないかや、呼吸の有無など一人ひとりをチェック、多くの園では午睡チェック表の作成を行なっているという。だが、なにかと書類作成の多い保育の現場。大切なチェック表だとは分かっていても、表をつくるとなると、それだけで保育者の負担は増えることになっていた。

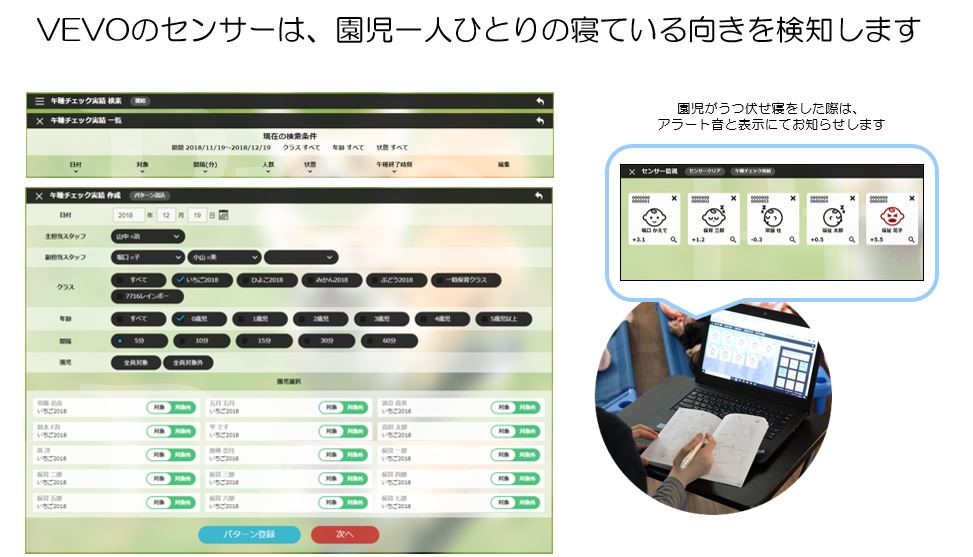
オムツにさっと差し込むだけで体の向きや体温の変化をキャッチ
「VEVO(ビーボ)のセンサー」は赤ちゃんのおむつにつけることで体の向きを自動で記録、うつぶせになった時には保育業務支援システム Child Care System+Pro(チャイルドケアシステム プロ、以下CCS+Pro)の画面ごしにアラームで知らせてくれる。検知機能だけでなく、寝返りの回数や、検知温の変化も数値化してデータ分析、記録として残すことができる。

複数の園児のデータを記録することも可能なため、体調に注意した方がよい園児を相対的に把握することもできるとしている。連絡帳の記入や一日の記録など、子どもと向き合う時間の合間に事務仕事も多い保育の現場。書類仕事が増えれば増えるほど、保育士の目が子どもに行き届きにくくなるのも事実。ITのおかげで保育士が子どもに目をかけられる時間が増えるのならば、保育者の労働環境改善だけでなく、園児にとっても嬉しい話。小さな命を預かる現場、ITと人間、両方の目を使った鉄壁の守りの取り組みが動き出そうとしている。
[TOP動画引用元:https://vevo-robot.com/]









 サブ会場の一つである渋谷キャスト スペースでは、今年5月11日に創刊95年目を迎えた国内唯一の点字新聞の発行など、バリアーゼロ社会の実現に向けて活動を続ける毎日新聞社と協力し、「ヒューマンライブラリー」を開催。障がいや難病を抱える人、LGBT当事者やその家族らを、貴重な物語が詰まった“本”に見立て、参加者との対話を通して相互理解を深めるというかつてない取り組みだ。
サブ会場の一つである渋谷キャスト スペースでは、今年5月11日に創刊95年目を迎えた国内唯一の点字新聞の発行など、バリアーゼロ社会の実現に向けて活動を続ける毎日新聞社と協力し、「ヒューマンライブラリー」を開催。障がいや難病を抱える人、LGBT当事者やその家族らを、貴重な物語が詰まった“本”に見立て、参加者との対話を通して相互理解を深めるというかつてない取り組みだ。
 「最初、
「最初、
 人体の能力を拡張するテクノロジーやITを駆使し、人機一体の新たなスポーツを創造する超人スポーツ協会は、車輪を回転させることで、ターンテーブルのように音楽をプレイできる「車いすDJ」や、横すべりが可能な電動アシスト全方向車いすを使って、ドリフト走行などのテクニックで競い合う車いすレース「スライドリフト」などの体験会を、渋谷駅13番出口地下広場とケアコミュニティ・原宿の丘の2箇所で実施した。
人体の能力を拡張するテクノロジーやITを駆使し、人機一体の新たなスポーツを創造する超人スポーツ協会は、車輪を回転させることで、ターンテーブルのように音楽をプレイできる「車いすDJ」や、横すべりが可能な電動アシスト全方向車いすを使って、ドリフト走行などのテクニックで競い合う車いすレース「スライドリフト」などの体験会を、渋谷駅13番出口地下広場とケアコミュニティ・原宿の丘の2箇所で実施した。 慶應義塾大学大学院メディアデザイン研究科による「タッチ・ザ・サウンド・ピクニック(Touch the sound picnic)」は、音の抑揚やリズムを振動に変換し、手や指先で感じることのできるデバイスを活用したワークショップ。これは、聴覚障がい者の音楽鑑賞や、会話の補助手段を想定して開発されたプロダクトの一例だ。
慶應義塾大学大学院メディアデザイン研究科による「タッチ・ザ・サウンド・ピクニック(Touch the sound picnic)」は、音の抑揚やリズムを振動に変換し、手や指先で感じることのできるデバイスを活用したワークショップ。これは、聴覚障がい者の音楽鑑賞や、会話の補助手段を想定して開発されたプロダクトの一例だ。 「ミュージアーム(Musiarm)」は、義手業界のエンターテイメント性の向上を目的とし、慶應義塾大学大学院メディアデザイン研究科が進めてきたプロジェクトから生まれたプロダクト。楽器の機能が備わった上腕義手を装着することで、誰もが楽器演奏を楽しめるようになるだけでなく、そのユニークな音楽とパフォーマンスを通じて、新たなコミュニケーションを提供することを意としている。
「ミュージアーム(Musiarm)」は、義手業界のエンターテイメント性の向上を目的とし、慶應義塾大学大学院メディアデザイン研究科が進めてきたプロジェクトから生まれたプロダクト。楽器の機能が備わった上腕義手を装着することで、誰もが楽器演奏を楽しめるようになるだけでなく、そのユニークな音楽とパフォーマンスを通じて、新たなコミュニケーションを提供することを意としている。 東京メトロをはじめ、LINEARITY、大日本印刷(DNP)らが連携して構想を進めている「&HAND(アンドハンド)」は、LINEなどを活用して、手助けを必要とする人と手助けしたい人をマッチングし、具体的なアクションを後押しするためのサービス。電車内で、身体的、精神的な不安や困難を抱えた人がメッセージを送信すると、周囲の乗車客にLINEメッセージが届く。手助けを必要としている人の状況は、手助けしたい人にChatBotを通じて知らされる仕組みになっている。
東京メトロをはじめ、LINEARITY、大日本印刷(DNP)らが連携して構想を進めている「&HAND(アンドハンド)」は、LINEなどを活用して、手助けを必要とする人と手助けしたい人をマッチングし、具体的なアクションを後押しするためのサービス。電車内で、身体的、精神的な不安や困難を抱えた人がメッセージを送信すると、周囲の乗車客にLINEメッセージが届く。手助けを必要としている人の状況は、手助けしたい人にChatBotを通じて知らされる仕組みになっている。