家電から教育ツール、エンタメなど今や日常生活に入り込むほど身近な存在となった産業用ロボット。これから更なる成長が見込まれている市場ではあるが、それぞれ独自の環境、言語を用いているために、プログラミングそのものが非常に複雑で開発費用や工数がかかること、また、タスクやプロセス、動作環境に応じてプログラミングしなおす必要があるものがほとんどだ。

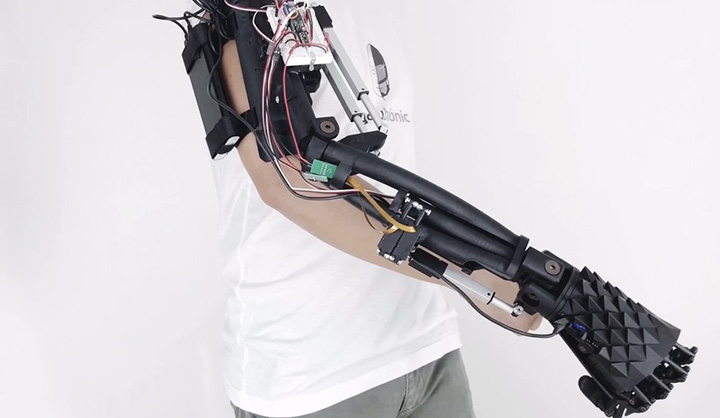
ドイツ、ドレスデンに拠点を置くスタートアップ、Wandelbotsが開発したのは、このような課題を一掃する革命的なシステム。センサー搭載のジャケット着用して身振り手振りをデモンストレーションすれば、ロボットが模倣できるようになる。
WandelbotsのCEO・Christian Piechnick氏いわく、「すべてのロボットを同じように動かせる共通言語を提供している」とのこと。9つの軸のセンサーがジャケットに埋め込まれており、磁気センサーや膨大なデータをコンピューターシステムに伝えることで、操作した人の動きを模倣することが可能になる。
難しいコードを一行も書く必要がない、つまりプログラミングの経験がなく、熟練の技術者でなくても、ロボットが、どのようにタスクをこなせばいいか、『学ぶ』ことを教えられるのだ。しかも作業に要する時間は10分程度。コストの大幅な削減にもつながる。

技術の進歩とともに、ロボットやAIが人間の仕事を奪うなど懸念も浮上しているが、Piechnick氏はロボットを人にとって代わるものではなく、今まで使っていた機械をよりよい機械にアップグレードするようなものと捉えている。
「効率よく、コストの削減が実現すれば、優秀な人材がより高度なタスクをこなすことができるということです」
フォルクスワーゲン、インフィニオン、ミディアなど数々の大手企業と契約を交わしてきたWandelbotsだが、スモールビジネスこそが顧客のターゲットとのこと。
「以前は、ロボットは投資利益率の側面からの中小企業には適していなかったが、私たちの技術でそれを変えていきたい」
産業ロボットの進歩は、技術など特定の分野のみならず、ビジネスそのものの構造をも大きく動かしていくかもしれない。
[TOP動画引用元:https://www.youtube.com]