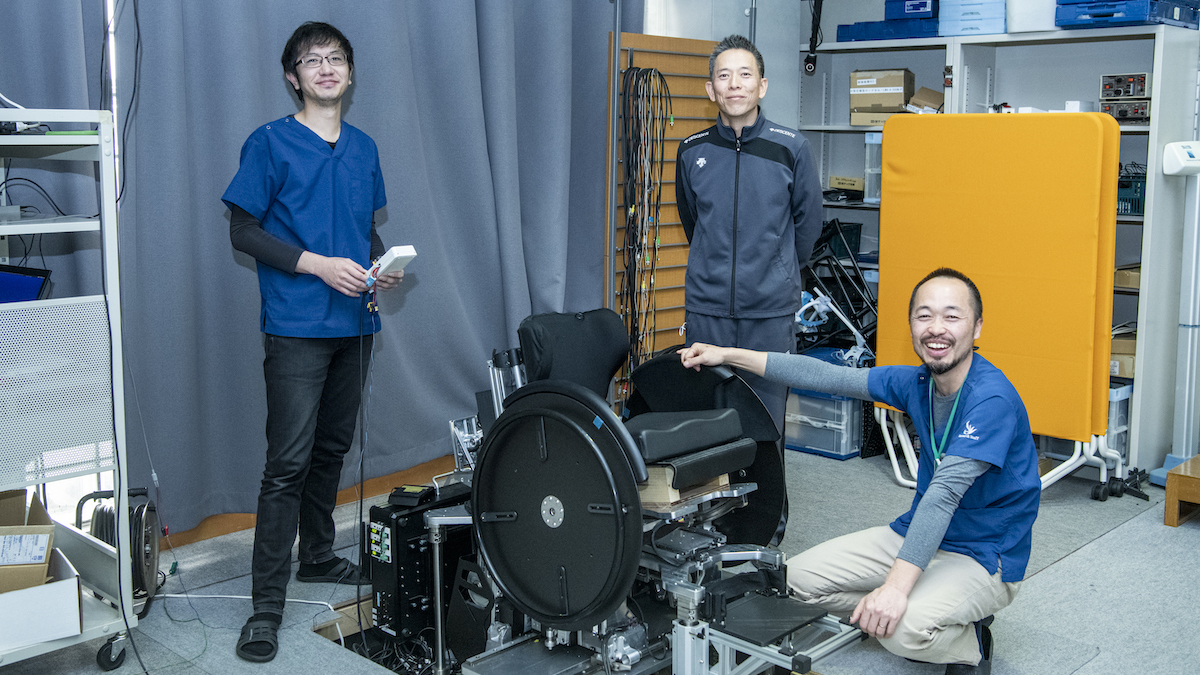
2019年に、編集長・杉原が代表を務める株式会社RDSが発表したシーティングデータを計測するシミュレーター「SS01」。そもそも車いす陸上アスリート、伊藤智也選手との取り組みから生まれ、fuRo(千葉工業大学・未来ロボット技術研究センター)の協力を経て完成した同プロダクトは、今年から国立障害者リハビリテーションセンター(以下、国立リハ)での研究に活用されている。果たして「SS01」は、医療現場にどんなインパクトをもたらす可能性を秘めているのか? そして計測データは、今後どう現場に活用されていくのか? 同研究所の室長 河島則天氏、研究員の小林佳雄氏、そして理学療法士の森野徹也氏にお話を伺った。
今はダウンスペックして
“適正技術”化している段階
「SS01」は、車いす陸上アスリートのパフォーマンス向上を視野に、質の高いシーティングデータを計測することを主たる目的に開発された。それをリハビリ現場で活用する意図は、どこにあるのだろうか?
河島:「SS01」はとても興味深いシミュレーターだと思いますが、パラリンピックスポーツのフィールドでの、『トップアスリートのためのパフォーマンス向上』という文脈だけに活用が留まるのはもったいないと感じました。そこで、裾野にいる多くの車いすユーザーにこの技術が活かされる方向付けをするために、約半年ほど前からリハビリ現場で活用し、研究を進めています。
河島氏は、これまでも“適正技術”をキーワードに、様々なリハビリテーション装置を手掛けてきた。今回も最新の技術が詰まったハイスペックを良い意味で削ぎ落とし、一般ユーザーが利活用できるものにする展開を模索している。そのために、経験豊富な理学療法士である森野徹也氏に、様々なアドバイスを求めているという。

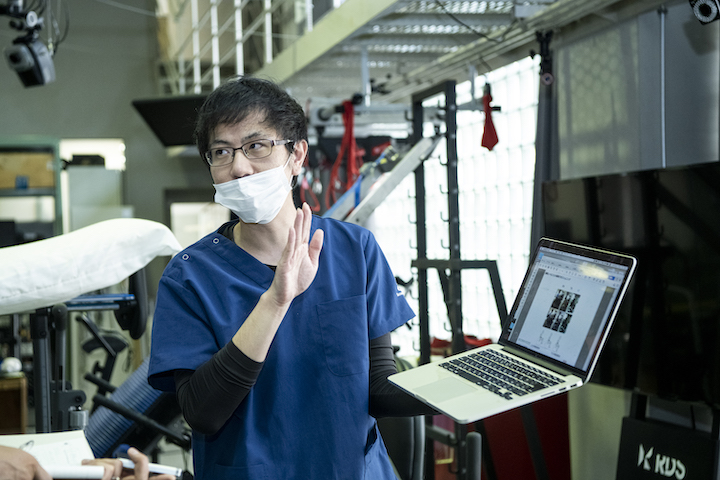
常に“適正技術”にこだわり、リハビリテーション装置を開発してきた河島則天氏。
河島:森野さんは、主に頸髄損傷者の自立訓練に長年携わってきたスペシャリストです。理学療法士として、医療の面だけでなく、どういう車いすで生活するのがベターなのか?ということをずっと追求してこられた。そんな森野さんに意見を仰ぐことで、我々は研究者目線に偏らずにデータ収集や計測が行えますし、常に足りない視点や考え方を補える。この関係性はとても有意義だと思っています。
森野:私はこれまで、車いすに乗ったユーザーの動作を目で見て、(ユーザーの体に)合っているかを評価してきましたが、「SS01」を導入したことで、科学的な根拠を持って評価できるようになるのではないかと期待しています。車いすの駆動動作や見た目だけでは判断が難しく、効率の良い推進力が得られているか否かも、トルクが高いとか低いとか、数値で判断できるようになれば、客観的な評価が可能になりますし、とても有益ですよね。
これまでは、例えば頸髄損傷のユーザーにマッチした車いすを調整する際、何度も微調整を繰り返しながら、理想的な状態に近づけていった。それは時間も手間暇もかかる作業だ。
森野:基本的に車いすの設定を変える場合は、ユーザーに一度車いすから降りていただいて、その間に僕らが調整をして、また乗っていただくということを繰り返さなければなりません。「SS01」は、ユーザーが座ったままアジャストできるというのが、まず画期的です。

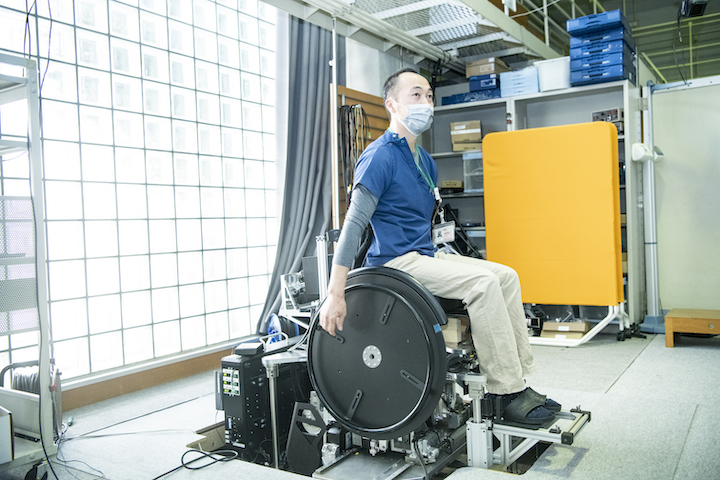
臨床研究仕様にダウンスペック調整された「SS01」。
経験依存、環境依存から
脱却できる基準作りを目指して
河島:本来は、ユーザーがいつも乗っている車いすをベースにして、車幅をどうしようか? 座面の高さは? バックレストの位置は?という具合にアジャストしていきます。そこで、また一つ問題が出てきます。それは、医療的な観点から(車いすの良し悪しを)見極めるにあたり、対応する病院によってスタッフの経験値に個人差があるという問題です。
森野:加えて、環境的な問題もあるかと思います。うち(国立リハ自立支援局)の場合は、デモ車も多いですし、当局の利用者さんであれば様々なタイプを試乗してパーツを組み換えながらマッチしたものを提案できますが、そこまでの環境が用意されておらず、しかも経験豊富なスタッフがいない場合、適切さを欠く車いすを処方・提供してしまうことになります。実際、そういったケースは少なくありません。

国立リハ自立支援局に籍を置く森野徹也氏。15年以上にわたって主に頸髄損傷者の自立支援に尽力してきた経験豊富な理学療法士だ。
現在は、適正な車いすの細部スペックに関する数値的な基準がないため、いざ車いすを作るとなったときに、医療スタッフや出入りするメーカー等の経験値、そして環境に依存する部分がどうしても出てきてしまう。「SS01」は、その“最適解”を、ある程度明確な数値で導き出すツールとしての役割が期待されている。
河島:あと、よく森野さんと話すのは、平地を走ることを想定したベストの車いすを調整したとしても、それがすべてではないということです。例えば傾斜を登るとき、あるいは段差を乗り越えるためのキャスター上げ(前輪/キャスターを上げる動作)のときはどうなのか? こうした応用動作にも対応し得る設定でなければいけないわけです。「SS01」で、様々なデータを取得したうえで、プラスαとして、そういった日常で遭遇する多くのシーンも考慮する必要があります。
森野:基本的には、車軸位置が後方に行けば安定しやすくなりますが機動性が下がります。車軸位置が前方に行けばその逆になって、登り坂ではキャスターが浮き上がってしまうことがある。(平地を走るのに)データ上でいいとされる車いすが、そういった日常のシーンを考えた場合、必ずしもベストにならないケースが出てくる可能性はあります。その落とし所を見つけられると、「SS01」で得られたデータは、より臨床で活かせると思いますね。
「SS01」の研究がスタートして約半年。対象者の身体機能に応じた車いす駆動動作のパターン分類の方向性が見えてきた。
確かに、車いすを自らの足として日常的に利活用する場合、考えられるシーンは平地だけではなく、とても複雑だ。ただ、「SS01」を活用することで、まずは平地での安定した、しかも効率の良い駆動動作が実現できる設定を見出すことができれば、それを出発点として応用動作を想定した細部の設定に移行できる。この半年で、ユーザーの身体機能(障害によって損失した上肢や体幹の麻痺の状態)によって、ある程度のパターン分離を行うことができつつあるという。
小林:頸髄、胸髄、腰髄と、損傷の箇所が異なると、麻痺する身体部位が異なり、車いす駆動動作の特性が異なります。そのため、駆動時のストロークパターンや、トルクのピークの出方も変わってくるんですね。例えば、上肢に麻痺がある頸髄損傷の場合だと車軸の後ろの方、胸髄損傷の場合だと前の方でピークが来ます。この事実は、「SS01」がなければ数値として把握できませんでした。
河島:現時点ではまだ検討の初期段階なので、車いす設定の最適解が得られるまでには至っていませんが、私たちが当初想定した以上にいろんなことが把握でき、身体機能に応じたパターン化ができる手ごたえが掴めてきました。このパターン化がより明確になっていけば、各々のユーザーに対して、補うべき技術の度合いも見えてくるはずです。
小林:現在見えてきた腕の軌道は、損傷の場所によって大きくは4パターン。人の動きはパターンに落とし込まれるとすごく説明がしやすくなります。そのパターン化された動きには、内なる情報が詰まっていますから、それを読み取って、ユーザーを良い方向に導いていければと考えています。
流動研究員として、河島氏と共に「SS01」の臨床研究を続ける小林佳雄氏。障がい者の身体機能のメカニズム解明を目的とした研究を精力的に進めている。
“最適解”の車いすが、
どこでも誰でも
調整できる未来へ
研究開始より半年。「SS01」で得られた情報は、まだ少ないかもしれないが、着実に可視化できるものが、ちらほらと出てきているようだ。目指すは、それを十分に活かした“最適解”としての車いすが、全国どこに行っても調整できる未来だ。
森野:まずユーザーに合った漕ぎやすい車いすを調整するには、安定したシーティングポジションを確保することが最重要です。ただ、過度に安定させてしまうと、かえってパフォーマンスが低下するので、ちょっとした体の動きを考えた座面とバックレストの角度もポイントになります。将来的には、そういったところまで何か数値的な基準ができたら、例えば全国に散らばった頸髄損傷者もそれに関わる医療従事者も助かることが多いのではないかと思います。
河島:まさにこうしたリハビリテーション現場への技術や理論の実装が、我々研究者に求められていることだと思います。「SS01」という技術を活用して、これまで見た目に傾倒して調整していた“漕ぎやすくて快適な車いす”を、ちゃんとしたデータで示す。見た目のパフォーマンスと、実際の数値(トルク)というのは、必ずしもリンクしているわけではないので、まずはそれらをより明確化していく必要がありますね。

かなり細かなレベルでシーティングポジションの調整ができるのが「SS01」の強み。
森野:経験で判断しているものを、数値化できれば理論的な裏付けが可能になります。生活のあらゆる場面で、パファーマンスを最大化できる車いすの設定を数値で共有できていけば、ユーザーも車いすを提案する側も負担や悩みが減っていくと思います。
河島:障がいによって損失した機能を埋め合わせる技術を必要としている人たちに、“適正技術”として行き渡るよう、これからも試行錯誤しながら、あらゆる可能性を広げて行きたいですね。
(プロフィール)
河島則天(かわしま・のりたか)
金沢大学大学院教育学研究科修士課程を修了後、2000年より国立リハビリテーションセンターを拠点に研究活動を開始。芝浦工業大学先端工学研究機構助手を経て、2005年に論文博士を取得後、カナダ・トロントリハビリテーション研究所へ留学。2007年に帰国後は国立リハにて研究活動を再開。計測自動制御学会学術奨励賞、バリアフリーシステム開発財団奨励賞のほか学会での受賞は多数。2014年よりC-FREXの開発に着手。他、対向3指の画期的な電動義手Finch 、立位姿勢リハビリ装置BASYSをはじめ、様々なリハビリテーション装置の開発を手掛けている。
 「JWX-2」は、電動アシスト自転車PASの技術「パワー・アシスト・システム」を応用し、車いすのハンドリム操作の負荷に応じて電動の補助力がはたらく車いす用電動アシストユニット。「JWスウィング」は「JWX-2」を装着した電動アシスト車いすだ。世界初※2となった片流れ制御機能※3に加え、下り坂はスピードを抑えたり、アシストの速度を調整したりといった従来のアシスト制御も兼ね備えている。使用者の身体の状態や使用環境に合わせて、ひと漕ぎあたりのアシスト走行距離をより短く、あるいはより長くと、細かな調整ができるようになった。
「JWX-2」は、電動アシスト自転車PASの技術「パワー・アシスト・システム」を応用し、車いすのハンドリム操作の負荷に応じて電動の補助力がはたらく車いす用電動アシストユニット。「JWスウィング」は「JWX-2」を装着した電動アシスト車いすだ。世界初※2となった片流れ制御機能※3に加え、下り坂はスピードを抑えたり、アシストの速度を調整したりといった従来のアシスト制御も兼ね備えている。使用者の身体の状態や使用環境に合わせて、ひと漕ぎあたりのアシスト走行距離をより短く、あるいはより長くと、細かな調整ができるようになった。 アシスト距離制御の共同開発者である福祉技術研究所株式会社 代表取締役 市川洌氏によると片手片足で車いすを駆動する動作は筋緊張を高め、関節変形の遠因になっているという。また、「電動アシスト車いすを利用すれば、障がいを有する高齢者であっても容易に、筋緊張 を高めることなく、駆動することができます。 速度や加速度、そして今回のアシスト距離制御が特にポイントですが、一人一人に合わせて調節すれば、高齢者施設内等で使用しても、ご本人の自立促進はもとより、施設職員などの介助負担軽減含め、周りも安心して見守ることができるなどの利用効果が分かってきました」とコメントしている。電動アシスト搭載の車いすを使用すれば、環境や身体状況により手動車いすでの駆動が困難だった方でも、介助者の力を借りずに自分で外出する可能性を広げることができるのではないだろうか。
アシスト距離制御の共同開発者である福祉技術研究所株式会社 代表取締役 市川洌氏によると片手片足で車いすを駆動する動作は筋緊張を高め、関節変形の遠因になっているという。また、「電動アシスト車いすを利用すれば、障がいを有する高齢者であっても容易に、筋緊張 を高めることなく、駆動することができます。 速度や加速度、そして今回のアシスト距離制御が特にポイントですが、一人一人に合わせて調節すれば、高齢者施設内等で使用しても、ご本人の自立促進はもとより、施設職員などの介助負担軽減含め、周りも安心して見守ることができるなどの利用効果が分かってきました」とコメントしている。電動アシスト搭載の車いすを使用すれば、環境や身体状況により手動車いすでの駆動が困難だった方でも、介助者の力を借りずに自分で外出する可能性を広げることができるのではないだろうか。