
目次
コーンテック社はこれまで、「自家配合プラントの構築」と「飼料マネジメント」を併せて提案することで畜産農家へのコンサルティングをおこない、「手間」と「コスト」を削減する試みをおこなってきた。その一方、深度カメラを用いながらAI技術を駆使し「畜産の見える化」に関する実証実験をおこなっている。彼らが目指す「スマート畜産」の現在について、CEOの吉角裕一朗氏に話を訊いた。
飼料を自家配合すれば
20~30%以上のコストダウン
コーンテックの主な事業は、「自家配合プラントの構築」と「飼料マネジメント」にある。そもそもなぜ自家配合プラントを勧めるかといえば、家畜の餌にかかる割合いが経営コストの60%以上を占めるほど大きい点だ。畜産が儲からない体質の要因であり、ゆえに後継者不足がおこりやすいという悪循環に陥っている。
一方、餌を自家配合にすると、地域の食品残さを利用して製造される「エコフィード」なども活用でき、輸入飼料だけに頼らない畜産リサイクルを構築することができる。事実、同社のシステムを導入した100カ所以上ある畜産事業者は、20~30%以上のコストダウンを実現させている。
「自家配合プラントは大きさもいろいろあり、飼育数100頭規模の業者から、1万頭規模の大企業まで導入できます」
AIを使い餌の最適な
配合バランスを導き出す
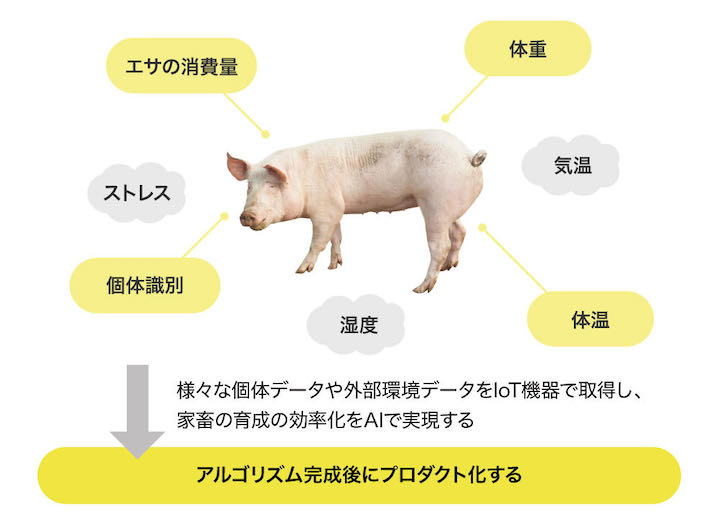
コーンテック社が面白いのは、そこにIoT技術を組み込もうとしている点にある。そこから得られるビッグデータをもとに、餌の最適な配合バランスをAI分析することで、これまで職人の勘に頼ってきた家畜の生育を「見える化」させようとしている。現在、実証実験をしているのは養豚だ。
「飼料の自家配合自体は難しいことではないんです。しかし、餌の栄養バランスの計算はとても複雑です。豚という生体が食べているものはデータも不規則で、これまではある程度の平均値でしかやれていませんでした」
家畜の生育には「気温」や「湿度」の影響が大きいことはこれまでも知られていた。家畜のエネルギー消費の半分は放熱によるもので、気温が暑ければ放熱しにくく、寒ければ放熱しやすい。夏と冬では食べる量が2倍程度違う。ゆえに、夏場はたんぱく質を濃くし、冬場は薄くするなどの経験値はあった。
「それもざっくりとした経験値であって、本当に機能していたかはあやしいんです。一般的に豚が出荷されるまでに160~180日かかります。最終的に110kgになりましたと言っても、体重が増えた要因を追うことができない。結果論でしかないわけです。
そこを追うためには、時間や日にちごとのデータを積み上げてグラフ化していくしかない。ある一週間の体重の伸びが悪い場合、それは台風がきて気圧が下がっていたからだと分析できたとします。すると、次に台風がきたときに対処ができるようになるわけです」
畜産スマートカメラ導入で
わかったこと
現在コーンテック社では、豚の高さや幅などを計測できる深度カメラを使用し、24時間体制の実証実験をおこなっている。肩幅や頭の大きさ、脛の長さなどの比率がわかれば体重を割り出すことも可能だ。
「体重以外にも、生死の判断、妊娠の判断、活動量の測定、何かしらの異変で豚舎の隅に豚が集まっているなどもわかります。今後はそういった挙動を観察することで、豚コレラなどの疫病を察知できるかもしれません。カメラを使えば、たとえ3万頭いてもすべてをロックオンできますから、人間が見たこともない数値が出てくることもありえます。今後新しいジャンルになり、ゲームチェンジが起きることが予想されます」
畜産スマートカメラを導入することで、上記のような「異常検知」や「人件費の削減」という点も重視しているが、コーンテック社の考えるミッションはもっと大きい。
「貿易の問題も含め、食料問題は世界的におこっています。そんな時代に効率よく食料を生産することは喫緊の問題であり、それこそが弊社のミッションです。畜産スマートカメラを導入することで、家畜は放牧したほうが良いという結果が生まれるかもしれない。そうなれば、近年欧米を中心に起きているアニマルウェルフェア(家畜の生活の質を高める飼育)の動きともリンクできます」

コーンテックのAI技術は
車の自動運転と近い
一般的に、畜産業は農業以上に技術の進化が遅れていると言われている。そんな業界にAIを持ち込むという発想の源は、吉角社長がかつてECサイトで車のバッテリーを販売していたなどIT畑出身という側面が大きい。
「車の燃費も、50年前ならリッター4~5kmが当たり前でしたが今や常識外れ。それはコンピューターのシミュレーション技術とデジタル制御によるものです。その裏側にはCPUの進化がある。コンピューターの精度が高まるほどに処理量の桁が変わり、試行回数が多くなって効率がアップする。畜産においても、生体をデジタル化しようとしてもこれまでは技術自体がなかったんです。でも、近年は高性能カメラも安くなり、いろいろと安価にできるようになった。弊社が取り組んでいるAIの領域も、車の自動運転に近くなっています。難易度は高いですが、そのぶん独自性が出るので面白い状況になってきています」

世界的に見ても、AIエンジンそのものを作ろうとし、サービスをクラウド化させようとする試みはほぼない。
「カメラや数値、データ、豚の飼育などは地域性もなく非言語の領域なので海外との垣根はないと思います。いまは豚が多いですが、今後は牛、鶏、馬、羊、山羊などに広げていければと考えています」
畜産業界を変える試みに
多くの個人投資家が賛同
この先見性と確固たるヴィジョンこそが、畜産業界に留まらず広く一般から注目されている理由でもある。その証拠に、ベンチャー企業への投資を通じて(未公開)株主として応援ができる日本初のマッチングサービス「FUNDINNO(ファンディーノ)」にて、2回の募集に対し500人、総額約5000万円の資金を調達している。
「農業や畜産業は業界が古いこともあって、マネーとの相性が悪いんです。そんな状況下で、VC(ベンチャーキャピタル)の都合で価格を決められるよりは、FUNDINNOのようなオープンな場所で、一般の方に買ってほしかった。市場が決めた価格のほうが正しいと思っていますから。ですので、自分たちの力を試す意味でも、よりパブリックになる意味でも、半IPOのようなかたちでスタートラインを切らせてもらいました」
結果を見れば、アグリテックの世界に関心を持っている人たちは想像以上に多いことがわかった。
「畜産スマートカメラの有料版は11月にリリースをする予定です。今回わかってきたのは、餌の領域だけではなく、これまで人間の目でおこなってきた観察や飼育の多くをカメラで置き換えられるということ。そうなると、必ずしも自家配合プラントとセットで販売しなくてもいい。また、実証実験を重ねることで、自分たちでは考えつかなかった発想が生まれてきています。これからどんなことが起きるか、私たちも楽しみです」








































