コロナウイルスの感染拡大を食い止めるために、遠隔医療、非接触医療の重要性が叫ばれ、現場に耐え得るソリューションの開発、提供にテック企業も奮闘し続けている。前回記事に続き、感染患者を受け入れる医療機関でウイルスと闘うロボットを紹介しよう。
あの4足歩行のロボットが
医療機関でミッション始動!

大胆なビジュアルと動きでこれまでも多くのロボット好きを驚かせてきた、Boston Dynamicsの四足歩行ロボット『Spot』が、コロナウイルスの最前線に立つ医療従事者たちの負担を軽減すべく、動き出した。
同社はマサチューセッツ州にあるブリガム・アンド・ウイメンズ病院に派遣したロボットの作業結果をシェアし、ハードウェアとソフトウェアのデザインについてもオープンソースにするなど、他の開発者やロボット技術者に対しても、医療従事者へのサポートを促している。
現在『Spot』が行っているタスクはiPadを背負い、救護テントにいる患者と医療従事者のビデオ通話を取り持つこと。医師は自宅からでも患者とコミュニケーションが図れ、感染の危険性を軽減することができるだけでなく、人員削減にも大いに貢献することができる。
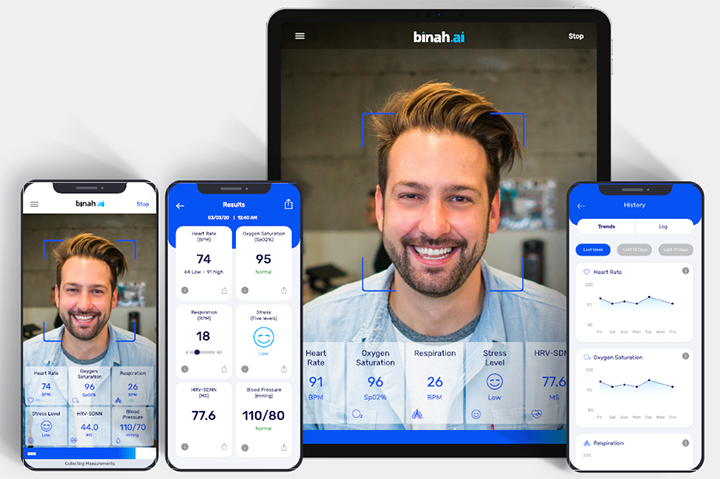
次のステップとして、赤外線カメラ技術を使って患者の体温や心拍、酸素飽和度などを測定することも検討中。また、UV-Cライトでウィルスの除去や殺菌を行うことも今後、視野に入れており、テストや検証次第で詳細が公表できそうとのこと。販売開始時(http://hero-x.jp/movie/8156/)には予測もつかなかった事態を前に、『Spot』がどこまで威力を発揮するか、続報を待とう。
世界中が注目する
テレプレゼンスロボット
『OHMNI ROBOT』
OHMNI ROBOTはシリコンバレーのロボティックス新興企業OHMNILABSによるテレプレゼンスロボット。解像度13メガピクセル、4Kワイドアングルという高性能カメラやファーフィールドマイクなどの高スペックをほこり、ANAホールディングス初のスタートアップとなるアバター事業でもパートナーとして採用されるなど、日本国内でも認知を拡大してきた。ISOコンサルタントのISO総合研修所はコロナウィルスの感染患者と医療従事者、また患者の家族との遠隔でのコミュニケーション支援として、医療機関にてOHMNI ROBOTの提供を開始した。
また、ベトナムで2016年に発足した、スタートアップが集結する国家プロジェクト「Project 844」においても、OhmniLabs がコロナウイルス対策を行うチームの一員として選出されるなど、世界各国からの注目度も高い。テレプレゼンスのソリューションが数あるなか、デバイスが全て3Dプリンターで製造されている点も、全世界に市場を広げる上でのアドバンテージとなるかもしれない。
人間の代わりとなり得るか、あるいは、人間の能力をも超えるのか。ロボットが秘める可能性はまだまだ未知数だ。