東京工業大学の研究室の一角に置かれている、通称「ガイコツ君」。一見すると普通の骨格模型ですが、実は動く人型ロボットです。ガイコツ君が、まるで人間と同じように動く様子を撮影した動画は、公開から1年未満で再生回数70万回を超え、世界中の人たちが注目して見ていることが分かります。このなめらかな動きを可能にしているのは、全身にまとった数多くの人工筋肉。従来のカクカクとしたロボットとは明らかに違うしなやかなで、違和感のない動きは、“彼”がロボットであることを忘れてしまうようです。
“動く繊維”が想像力をかきたてる
人工筋肉を“動く繊維”と考えれば、さまざまな応用が期待される
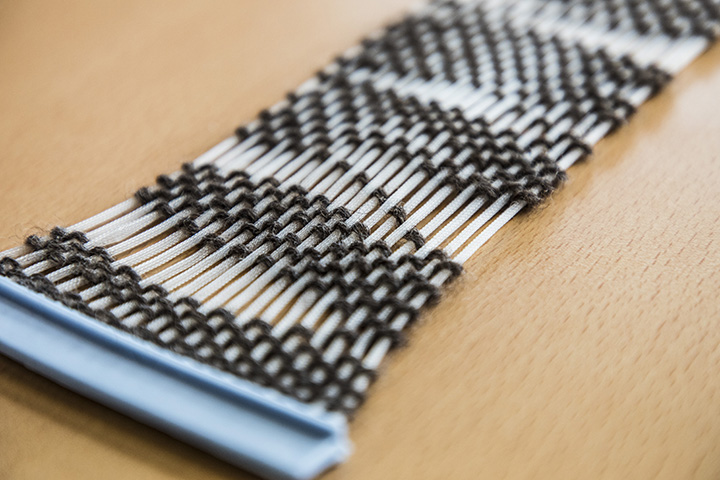
人工筋肉とはその名の通り、生物の筋肉に近い動きを目指して作られた、伸縮性があるアクチュエーター(駆動装置)のこと。色々なタイプが開発されていますが、ガイコツ君に使われているのは細い径の「マッキベン型人工筋肉」。これは、周囲に繊維を編んだゴムチューブの内部に空気を送って収縮させ、その際に発生する力で動きを得るものです。
ガイコツ君の開発に携わった東京工業大学の鈴森康一教授は、ロボットやアクチュエーターの専門家で、「新しくて画期的なアクチュエーターができたら、初めてそれによって画期的なロボットができる、というスタンスでやっています」と話します。
マッキベン型人工筋肉に着目したきっかけは、6年ほど前、鈴森教授(当時は岡山大学所属)のもとに、とある海外メーカーから、小さくて細かいロボットを作りたい、という相談があったことでした。
 この要求にこたえようと試行錯誤した結果、マッキベン型人工筋肉を小型化すれば良いのでは?と鈴森教授は推察。マッキベン型人工筋肉は1960年ごろにアメリカで開発され、すでに製品化もされていましたが、径が太く、硬いのが一般的でした。そこで鈴森教授は、脇元修一准教授(岡山大学)らと研究開発をスタートし、大学近くの池田製紐所にも協力を求めながら、小さい径のマッキベン型人工筋肉を完成させたのです。
この要求にこたえようと試行錯誤した結果、マッキベン型人工筋肉を小型化すれば良いのでは?と鈴森教授は推察。マッキベン型人工筋肉は1960年ごろにアメリカで開発され、すでに製品化もされていましたが、径が太く、硬いのが一般的でした。そこで鈴森教授は、脇元修一准教授(岡山大学)らと研究開発をスタートし、大学近くの池田製紐所にも協力を求めながら、小さい径のマッキベン型人工筋肉を完成させたのです。
従来のマッキベン型人工筋肉は20 mmから5 0 mmほどの外径でしたが、鈴森教授らが開発したのはわずか2 mmから5mmほどの細いもの。径を小さくするにあたり、これまで特に問題にならなかった耐久性の問題などが露呈し、一つ一つ解決していくのは大変だったそうです。ほかにも、細いゴムを均一に押し出す力加減の難しさ、メッシュを編みこむ角度が一度違うだけで特性が変わるほどの繊細さにも直面。池田製紐所にとっても、編む角度の細かい指示は初めての経験で、試行錯誤の連続だったと言います。
残念ながらメーカーの都合により、ロボットの完成にはいたらなかったものの、小さい径の人工筋肉は手元に残りました。たとえば、その人工筋肉を束ねて布を作り、さらに服に仕立てればパワースーツになります。それは、これまでの硬くて、重いパワースーツとは異なり、着心地が良く、体にフィットする製品。人工筋肉をさまざまにアレンジできる“動く繊維”ととらえれば、パワースーツ以外にも可能性は広がると考えられました。
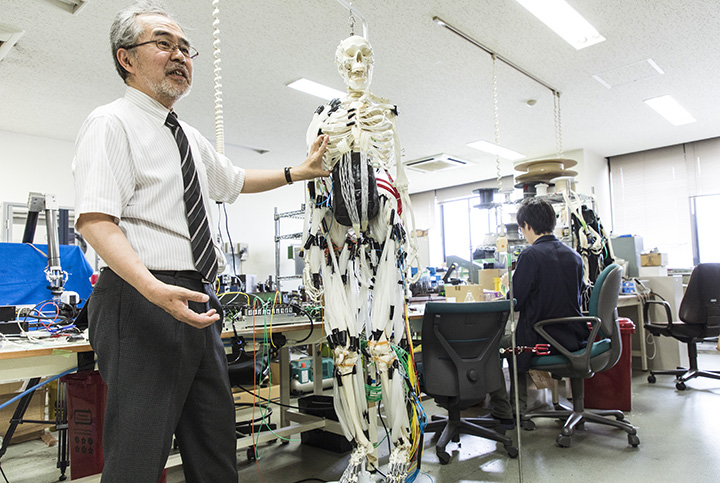
東工大の鈴森教授の研究室にある「ガイコツ君」
その後、東工大へ移った鈴森教授は、「ガイコツ君」やパワースーツなどの開発を手がけます。一方でアパレルや福祉介護、ロボットの分野に携わる企業や研究者から、鈴森教授らの作った人工筋肉への問い合わせや、使ってみたいという要望が寄せられるようになりました。
「きっと色々な分野で新しい可能性を感じ、想像力をかきたてるんだと思います。生き物はもともと繊維や、筋繊維構造でできているので、自然の物を真似たものを作るのには最適な素材ではないかと多くの人が期待してくれました」(鈴森教授)。

サンプルとして出荷している3サイズの人工筋肉
もともとは研究のために作った人工筋肉でしたが、あまりに反響が大きいため、2016年4月、鈴森教授は東工大と岡山大発ベンチャーとして「s-muscle(エスマスル)」を設立。同年8月から、2ミリ、2.3ミリ、4.2ミリの3種類のサンプル品として人工筋肉の販売を始めました。製造に携わる池田製紐所としても新しい分野への挑戦であり、鈴森教授も「岡山県は全国有数の繊維産業が盛んなところ。普通の繊維ではなく、動く繊維として、どんどん使われるようになってもらいたいと考えています」と話します。
人間と共存するやわらかいロボット
 「産業革命以降、工学というのはとにかくパワーの大きさやスピードの速さ、精度の高さばかりを追求してきました。そのおかげで素晴らしい製品がたくさん生まれたのは事実ですが、これからの社会で求められている人間社会に共存するロボットというと、もう少し、程よい加減が必要だと思います。精度がものすごく良いわけじゃないし、速い速度を出せるわけでもないし、力が強いわけじゃない。昔の価値観で言えばダメなロボットかもしれません。それでも人間と接するロボットとしては、そのような性能の高さより、むしろ安全に優しく作動するような、やわらかさが求められていると思います」(鈴森教授)。
「産業革命以降、工学というのはとにかくパワーの大きさやスピードの速さ、精度の高さばかりを追求してきました。そのおかげで素晴らしい製品がたくさん生まれたのは事実ですが、これからの社会で求められている人間社会に共存するロボットというと、もう少し、程よい加減が必要だと思います。精度がものすごく良いわけじゃないし、速い速度を出せるわけでもないし、力が強いわけじゃない。昔の価値観で言えばダメなロボットかもしれません。それでも人間と接するロボットとしては、そのような性能の高さより、むしろ安全に優しく作動するような、やわらかさが求められていると思います」(鈴森教授)。
たとえば鈴森教授らのチームが手かげた20mもの長さのロボットアームは、これまでのロボットの概念をくつがえすもの。ヘリウムが充填されたバルーンの構造材でできていて、重さはわずか1kgほどしかありません。ふわふわっとしつつも、20個のジョイントはそれぞれが人工筋肉によって動かされ、高いところはもちろん、狭い空間を目指して入っていくこともできます。この軽さ、そして動きを可能にしているのは、小径の人工筋肉だからこそ。
「動きは遅いし、精度も出ないし、風が吹いてきたら流されちゃうし…。今までの観点で言えば、全くダメダメなロボットかもしれませんが、万が一、落ちてきても人に危害を加えることはほぼないでしょう。好(い)い加減がこのロボットの強みなんです」(鈴森教授)。
「ジャコメッティアーム」と名付けられたこのロボットアームの先端にはカメラが付いていて、災害現場などでの状況確認に使われることを想定しています。「ドローンで撮影すればいいじゃないか、という人もいます。けれどドローンで入れない穴や狭い空間ってありますよね。その点、このロボットアームは、内部がどうなっているか分からない空間にもとりあえず突っ込んで、ぶつかりながらも前に進んで、状況確認できるのが大きな強み。普通、機械はぶつかって壊れないよう作動させるものなので、全く今までの観点とは違うものですね」(鈴森教授)。
人間にとって使いやすくて、また人間を真似た構造物も作りやすい、という人工筋肉。今までモーターで動かしていたロボットではできなかった新しい価値が、人工筋肉によって生まれるのではないかと期待は高まります。
鈴森教授は「たとえば果物は大きさや形が全部違うので、ロボットがつかもうとするときには、形に合わせて力加減を変える必要が出てきます。適切に、相手の形になじむということが今までのロボットでは難しかったのです」と話し、「これからの社会では、“やわらかいロボット”が必要になってきます。好い加減、というのが重要なファクターです」と教えてくれました。
福祉分野での展開に期待
 s-muscleについては「小さな会社ですし、研究もありますから、対応可能な規模でやっていくのがスタンス」だそうで、さまざまな企業や研究機関との連携を重視。すでに洋服の専門学校と東工大で共同研究契約を結び、人工筋肉を使った洋服の開発を進めるなど、いくつかの分野で製品化に向けた検討が始まっています。今はさまざまな分野に、機能検証用のサンプルとして出荷していて、その中からどのような使い道があるか、検討している段階ですが、今後は小口ユーザーへの販売も検討していくそうです。
s-muscleについては「小さな会社ですし、研究もありますから、対応可能な規模でやっていくのがスタンス」だそうで、さまざまな企業や研究機関との連携を重視。すでに洋服の専門学校と東工大で共同研究契約を結び、人工筋肉を使った洋服の開発を進めるなど、いくつかの分野で製品化に向けた検討が始まっています。今はさまざまな分野に、機能検証用のサンプルとして出荷していて、その中からどのような使い道があるか、検討している段階ですが、今後は小口ユーザーへの販売も検討していくそうです。
人工筋肉を使った製品を実用化させていくにあたり、ネックになってくるのは動力源としてコンプレッサーを使うこと。人間が装着するものを作るうえでは、もっと柔軟に使える動力源の開発も必要です。そのため鈴森教授らは、人工筋肉の燃料電池化についても研究を進めていると言います。

コンプレッサーによって伸縮する人工筋肉。束にすれば本当に生物の筋肉のよう
今後、大きく期待されているのが福祉分野での展開です。「たとえば握力の弱い人のために、人工筋肉で作動する手袋を作って物を持てるようにする、というのが一番簡単なイメージ。そのほか姿勢を矯正したり、入院患者の血栓予防に役立てたり、さまざまな可能性があると考えられます。軽いから扱いも楽ですし、濡れても大丈夫なので洗濯できるのも大きなメリットだと思います。価格が下がれば使い捨てでの製品も考えられるでしょう」。
将来は私たちの生活を支える当たり前のものとして、人工筋肉が織り込まれた製品が、身近にあふれているのかもしれません。