イタリアで開催される世界最高峰のデザインコンペティション「A’ Design Award & Competition 2020-2021」の受賞プロダクトが発表になり、株式会社RDSがエントリーした3つのプロダクト全てがゴールドを初めとする各賞への入賞を果たした。この特集ではそんな受賞作品をフォーカスしていく。
ゴールド受賞 社会課題解決型ロボへの期待
普段通りに歩くだけで健康課題を可視化
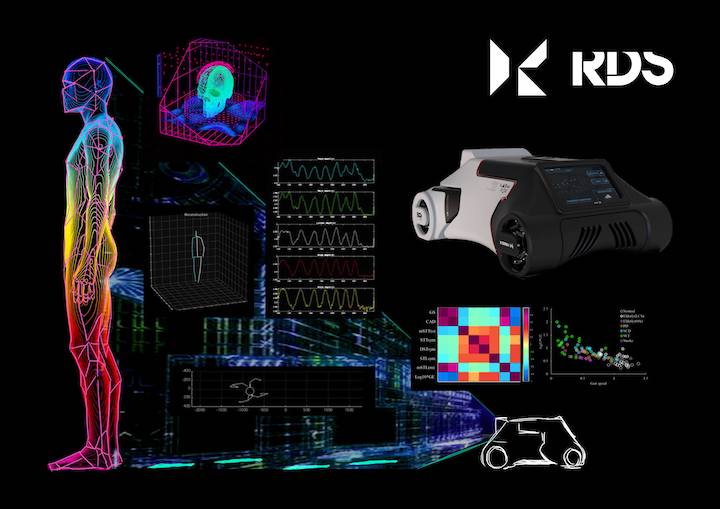
平らな直線を5メートル往復歩行するだけで、人の健康状態を測定し、さまざまな疾病や進行度を分析できる装置、健康寿命についてさまざまな課題を抱える現代社会において、そんなロボットが誕生したと聞けば、多くの人が関心を持たずにはいられないはずだ。そんなヘルスケア領域のプロダクトで、RDSが開発した歩行解析ロボット『Gait Analysis Robot Medical Health Measurement System』(仮)がメディカルデバイス・医療機器デザイン部門のゴールドを受賞した。
この装置のすごさはその測定方法にあると言える。従来の動作解析とは異なり、実に簡易的なのだ。3Dカメラを搭載したAGV(無人搬送車)ロボットが、歩く被験者の後ろを追跡しながら歩行中のデータを集め、歩行状況を正確に把握するというもの。あらゆる疾病の原因と密接に関係している「歩行」に注目し、これまで発見が難しかった病気の早期発見と予防に期待のかかるプロダクトだ。
歩行状況は、認知症、脳卒中、関節疾患及び骨折・転倒など、健康寿命を縮める原因として注目されている。たとえば高齢者の転倒による骨折から寝たきりというパターンも多いため、転倒予防(転倒リスク)の観点からも、簡単にセルフチェックできる歩行測定の必要性を感じる医療従事者も多くいた。こうした社会的な背景もあり、このロボットへの期待が高まっているというわけだ。
また、リハビリなどの機能訓練の場においては、その効果を測る手段としても有効だ。訓練を提供する施設や事業者にとっては、リハビリによって利用者の身体機能がどれくらい改善したのか、個別機能訓練加算という視点からも評価する必要がある。歩行状況を正確に把握することが、さまざまな観点から有効であることは広く知られるところであり、スマホの登場で歩行測定は簡便に実施できるようになっていた。だが、こうした簡易な方法によるデータは、精度の低さなど多くの課題もある。
確かなデータが取れる新たなプロダクト
一方で、歩行スピードや歩幅の計測だけでなく重心の移動まで推定するなど、本格的な歩行分析には、人にマーカーを装着して測定する光学式動作解析システムが必要だが、そのような高性能な機器を揃えている施設は限られている。さらに、一人当たりの測定準備にも手間がかかる。高価で手間がかかることから実施できる人数が限られ、分析に必要なデータを収集できないという課題もあった。
その点『Gait Analysis Robot Medical Health Measurement System』は、クラウドサーバー上で協力医療機関のもつ疾病データとAIで照合し、被験者のさまざまな疾病や進行度を測定する。将来的にはRDSが持つデータバンクと照合することで、歩行データからの疾患の発見を目指すことが開発コンセプトとなっており、従来は発見が難しかった脳卒中など多くの疾病の前兆となる体調の変化や未病対策への活用など大きな期待がよせられている。『Gait Analysis Robot Medical Health Measurement System』は歩行解析情報のデータバンク化に向けて、大きな一歩となった。
今回の受賞を称え、同プロダクトのネーミングを日本ヒップホップ界のレジェンドGAKU-MC(ガクエムシー)が担当するという情報もある。世界のリハビリを変えるとまで言われるこのプロダクトにどんなネーミングが付けられるのか、引き続き注目していきたい。
関連記事を読む