今すぐにとはいかなくとも、自由に海外渡航ができるようになったら、どこに出かけようかと旅行の計画を夢想している人も少なくないだろう。航空券やホテルがウェブ予約で完結するのは今や常識だが、以前、HERO Xでも紹介した「MaaS」の台頭により現地での交通手段もスマホアプリで手配できるものが増え、今後さらにに利便性の向上が期待されている。 今回紹介するのは、「PassApp Taxis」はカンボジア発の配車アプリ。東南アジア諸国ではおなじみのあの乗り物も、アプリ1つで配車できるらしい。
アプリの開発拠点がある首都プノンペンは当然のこと、アンコール遺跡群の観光拠点となるシェムリアップ、ビーチリゾートで知られるシアヌークビル、タイとの国境寄りのバッタンバン、メコン川沿いのコンポンチャム、ローカルな魅力で人気を博す観光地カンポットまで、カンボジア国内の広範囲で利用できる「PassApp Taxis」。

使い方はよくある配車アプリと同様で、行き先を指定し、希望の車種を選択、降車する位置をセッティングすれば予約完了だ。15分5000リエル(約130円)でスタンダードな乗用車、30分6000リエル(約160円)でSUVが選べるだけでなく、リクシャー(30分3000リエル=約80円)やトゥクトゥク(30分4000リエル=105円)といった三輪タクシーも配車できるのが、いかにも東南アジアらしいユニークなポイント。
タクシーを捕まえたはいいが、ぼったくられてしまった、わざと遠回りされて想定外の金額を請求されてしまったというトラブルは旅先ではよく聞く話。「PassApp Taxis」では、乗車する前からあらかじめ料金やルートが明確になっていれば安心できるし、ローカルな旅気分も満喫できるなら、観光客には非常にウケがよさそうだ。
一方で、運転手と料金を交渉することやコミュニケーションを図ることこそ旅の醍醐味!と感じる人にはどう映るのかが気になるところだが、トラブルを未然に防ぐという意味では頼もしい存在となりそうだ。
万が一、アプリ上と異なる料金を請求されたり、荷物を置き忘れたりというトラブルが発生した場合には、Facebookページなどソーシャルメディア上で担当スタッフとやり取りできるので心配無用。
日本では法制度の問題もあり、ライドシェアサービスが市民権を獲得するまでにはまだ時間がかかりそうだが、リモートワークが定着し、できれば満員電車での移動は避けたいという人も増えてきたなか、「チョイ乗り」できるモビリティはこれからニーズが拡大しそうだ。
「PassApp Taxis」もベトナム、タイ、ラオスといった周辺の国々を巻き込んでいくことでどんどん成長していくかもしれない。今後の動きもチェックしてみよう。







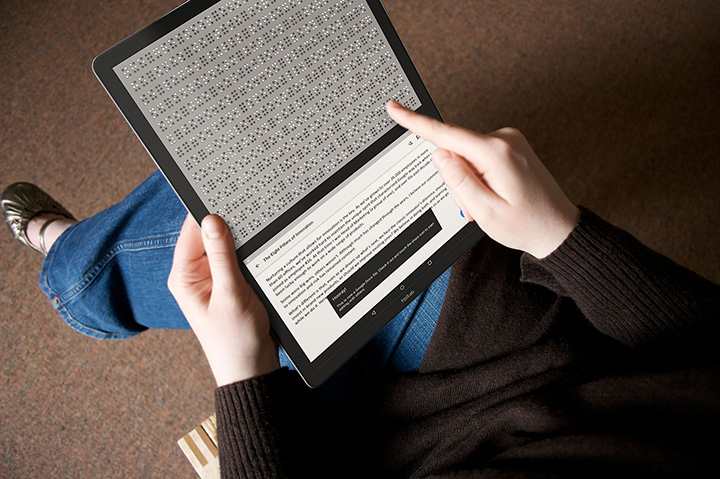
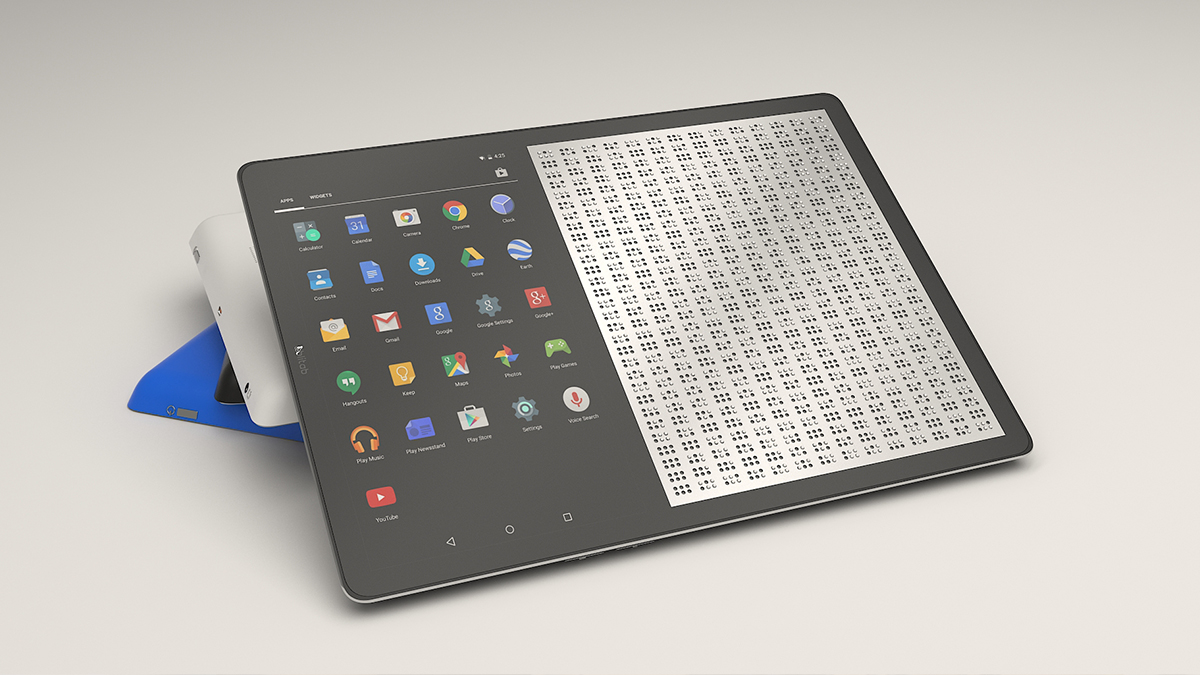
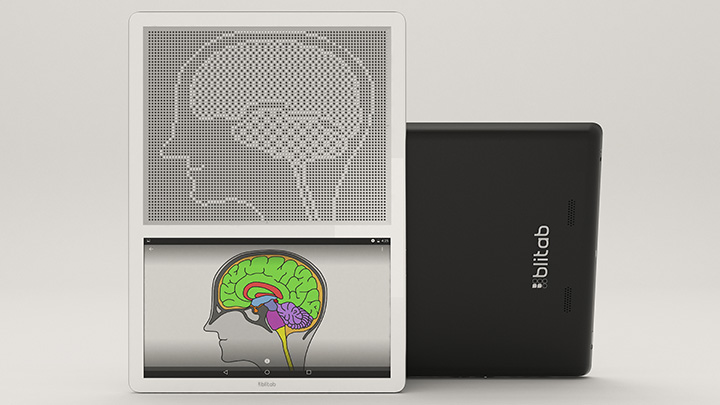 これまでも、電子書籍やウェブサイトを点字表示する器具は登場していました。しかし、価格が高かったり、一度に表示できる文字数が少なかったりと、点字読者にとって満足のいくものではありませんでした。これが「BLITAB」は従来の価格の約10分の一(500ドル前後)で発売される予定とのことです。
これまでも、電子書籍やウェブサイトを点字表示する器具は登場していました。しかし、価格が高かったり、一度に表示できる文字数が少なかったりと、点字読者にとって満足のいくものではありませんでした。これが「BLITAB」は従来の価格の約10分の一(500ドル前後)で発売される予定とのことです。




























