『パラフェス2017 ~UNLOCK YOURSELF』は、スポーツと音楽の世界でオンリーワンの輝きを放つ超人たちが繰り広げるスペクタクルなパフォーマンス・イベント。2回目となる今年は、両国国技館を舞台に、来年3月のピョンチャンパラリンピックで出場が見込まれるアルペンスキーやパラアイスホッケーの日本選手や、“和製スティービー・ワンダー”の異名を持つ全盲のシンガーソングライター・木下航志氏、歌舞伎俳優の中村壱太郎氏ほか、ブラジルからは、両腕のないミュージシャン、ジョナタ・バストス氏がこの日のためだけに来日するなど、多彩な超人たちが集結し、4300人の観客を感動の渦に巻き込んだ。
歌舞伎俳優がパラリンピックの歴史を紹介!?

今年のパラフェスのテーマは、「冬」。銀世界をイメージさせる映像やライティング、サウンドが見事に融合したステージが、幻想的な美しさを放つ中、オープニングでは、歌舞伎俳優の中村壱太郎氏が女形のこしらえで登場。歌舞伎口上で、パラリンピックの歴史を紹介した。
口上と共に、あらかじめ座席に配布されていたリストバンドが赤・青・緑の光を放つと、観客たちが感動の声を上げた。これらの三色を配したパラリンピックのシンボルマークは「スリーアギトス」と呼ばれている。「アギト」とは、ラテン語で「私は動く」という意味で、困難なことがあっても諦めずに、限界に挑戦し続けるパラリンピアンを表現しており、いずれの色も、世界の国旗で最も多く使われている色であることから選ばれたという。
ブラジルが生んだ奇跡のミュージシャンが奏でる、熱いメロディ
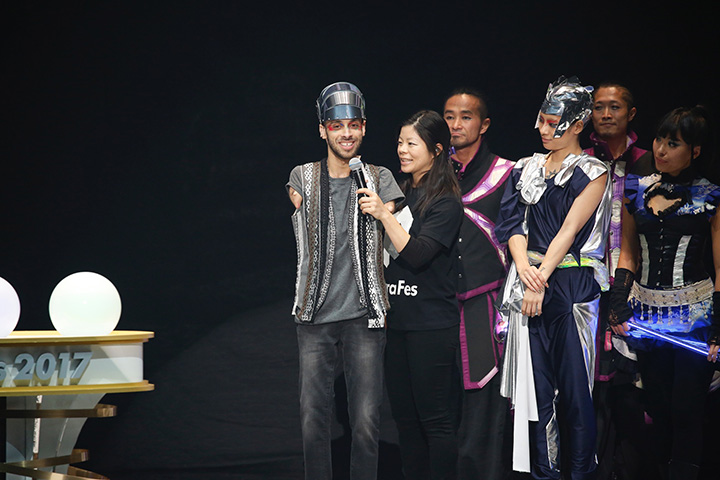
今回が初来日のジョナタ・バストス氏
続いて、パラフェスダンサーズとパラフェス・キッズによるパフォーマンス、パフォーマンス集団「かぐづち」によるLEDを駆使した演舞、さらには、ミュージシャンのジョナタ・バストス氏が、両足でギターを弾くというまさに超人的な神技で演奏を披露。リオパラリンピックの閉会式でも話題を呼んだジョナタ氏のパフォーマンスは、一瞬たりとも目が離せないほど圧巻で、会場は早くも熱気に包まれた。
次に、パラフェスを主催する日本財団パラリンピックサポートセンター(パラサポ)の山脇康会長をはじめ、東京2020組織委員会の森喜朗会長らが登場した。発起人でもある野田聖子衆議院議員が「本当はこの3人で掛け合いの漫才をする予定だったんですけど、緊張してしまって(笑)」と述べると、会場にはドッと笑いが起きた。「どうかここにいる皆さんが、(パラスポーツやパラリンピックに関心のある人とない人の)架け橋になって、明るい日本を誇れるように」と観客にメッセージを送った。
「パラスポーツに対する価値観がガラリと変わった」
次に、応援ゲストを務める俳優・フィルムメーカーの斎藤工氏が登場。会場の熱気はさらに沸き、黄色い歓声が飛ぶも、「仕込みです(笑)」と返し、観客の笑いを誘う。パラスポーツの中で唯一、車いす同士のタックルが認められているウィルチェアーラグビーの代表選手やその周りの人々の生活を追ったドキュメンタリー映画「マーダーボール」を観て、その凄まじい迫力を感じ取り、パラスポーツに対する価値観が変わったという斎藤氏。
数ある冬季パラリンピックの中でも、スノーボードの成田緑夢選手に注目していることをアピールした。「先日、対談させていただく機会があったのですが、今、ものすごいエネルギーの塊のような状態の緑夢選手に、エネルギーをもらいました」と熱く語った。
時速100kmでパックが飛んでくる!?
パラアイスホッケーの魅力とは

続いて、応援ゲストの斎藤氏が、冬季パラリンピック競技の選手と共に、競技の魅力や見どころについて紹介するコーナーに突入。最初に登場したのは、パラアイスホッケー日本代表チームから、主将の須藤悟選手、高橋和廣選手、安中幹雄選手。2010年のバンクーバー大会で銀メダルを獲得して以来、実に8年ぶりのパラリンピック出場をピョンチャン大会で決めたばかりだ。
パラアイスホッケーは、「氷上の格闘技」と言われるほど、アグレッシブでスリリングな競技。「スレッジ」と呼ばれる競技用マシンを囲んで、各選手がルールなどについて説明すると、斎藤氏からは、次々と質問が飛び出た。
中でも印象的だったのは、スレッジに乗り、左右の手に持ったスティックで操る“パック”について、「(体などに)当たることも多々ありますか?」という問いに対する須藤選手の答え。「海外の選手だと、時速100kmくらいで飛んでくることもあります。防具を付けていても痛いですね(笑)」。いかに激しい競技かということが伺える。

快活なトークで会場を盛り上げたMCのnico氏(左)と本田朋子氏
「スキーのストックのように、“これ”で氷を掻きながら進んでいきます」と高橋選手が、スティックの使い方を説明していると、MCのnico氏が、「え、斎藤さん、(スレッジに)乗ってみたいんですか?」と煽り、観客席からは大きな拍手が。早速、試乗した斎藤氏は、「腕の力をものすごく使いますね」と、バランスを取ることの難しさを実感したもよう。「実際に生で見ると、ぶつかり合う音だったり、迫力が、全然違うんだろうなと思いました」と述べた。
「1月7~13日には、長野で国際大会が開かれます。もしお時間があれば、観戦に来ていただければ幸いです。パラアイスホッケーは、やはり観ていただくと、一番迫力が伝わると思います。それを経て、3月のピョンチャンに挑戦して、最高の結果を出せるように頑張ります」と須藤選手は、冬季パラリンピック大会への意気込みを見せた。
スピードも回転も迫力満点!
冬の花形競技、アルペンスキー
 続いて、アルペンスキー界をけん引する3人の日本選手が登場。2年連続ワールドカップ総合優勝を果たした強豪・森井大輝選手をはじめ、前人未到のパラリンピック2大会を連続制覇し、計3個の金メダルを獲得した狩野亮選手、ソチ大会のスラローム(回転)で金メダルを獲得した鈴木猛史選手が、時速120kmを超えるスピードで滑降することや、アルペンスキーの種目の種類などについて、映像と共に紹介した。
続いて、アルペンスキー界をけん引する3人の日本選手が登場。2年連続ワールドカップ総合優勝を果たした強豪・森井大輝選手をはじめ、前人未到のパラリンピック2大会を連続制覇し、計3個の金メダルを獲得した狩野亮選手、ソチ大会のスラローム(回転)で金メダルを獲得した鈴木猛史選手が、時速120kmを超えるスピードで滑降することや、アルペンスキーの種目の種類などについて、映像と共に紹介した。
 ステージ中央にあるのは、森井選手の競技用マシン。斎藤氏やnico氏が「カッコイイ!」と声を上げると、森井選手は「世界で一番カッコイイチェアスキーだと思っています」ときっぱり。「シートは、チェアスキーの心臓ともいえる部分で、自分の体の型を基に、F1で使われているドライカーボンという素材で、作っていただいています」とマシンに対するこだわりを力強く語った。
ステージ中央にあるのは、森井選手の競技用マシン。斎藤氏やnico氏が「カッコイイ!」と声を上げると、森井選手は「世界で一番カッコイイチェアスキーだと思っています」ときっぱり。「シートは、チェアスキーの心臓ともいえる部分で、自分の体の型を基に、F1で使われているドライカーボンという素材で、作っていただいています」とマシンに対するこだわりを力強く語った。
「ちょっと触ってみてもいいですか?」と斎藤氏。「(ドライカーボンは)柔らかくて軽いというか、外は当然硬いんですけれど」と感想を述べると、「シートの部分などは、自分の動きに合わせて、たわむようにできているので、すごくしなやかです」と森井選手がメカニック顔負けの解説を行い、会場には大きな拍手と驚きの声が響き渡った。
https://www.youtube.com/watch?v=T4Xbt6Y8gwg
次に披露されたのは、ピョンチャンでメダル獲得を目指す3選手が登場する本邦初公開のプロモーションムービー「The Change Maker」。アルペンスキーと選手たちの魅力が、スピード感溢れる映像とサウンドで余すことなく表現されており、観客は釘付けに。いかにエクストリームなスポーツであるかということが、ひと目で分かる内容だ。見終えた後、斎藤氏は「もう、マッドマックスもびっくり!みたいな迫力ですね」と興奮気味にコメント。
「僕たちの最大の目標は、表彰台独占です。皆さん、熱い応援をよろしくお願いします」と森井選手が述べると、会場には再び盛大な拍手が鳴り響いた。
日本とブラジルの異才が奏でる、
美しきコラボレーション

続いて、登場したのは全盲のシンガーソングライター・木下航志氏。昨年、国立代々木第一体育館で開催された第1回目のパラフェス(リンク挿入)に続く今回も、好評を博したブラインドコンサートを行った。観客はアイマスクを着け、心に沁み渡る木下氏の美しい歌声を耳だけで味わうという真新しい音楽鑑賞のカタチだ。ギタリストでありピアニストでもあるジョナタ氏が再びステージに登場し、木下氏と一夜限りのコラボレーションによる「スタンド・バイ・ミー」を披露。会場は、一体感と温かいムードに包まれた。

 終盤では、ブレイクビーツ・ユニットのHIFANA(ハイファナ)が、「パラスポーツの音(ノイズ)」で創作した新たな音楽を実演。その背後のスクリーンに映し出されたデジタル映像は、リオパラリンピックの名シーンや、振ると音が鳴るメダルなどを独自の手法で紡ぐというユニークな内容だった。イベントの最後を飾ったのは、ロックバンドWANIMA(ワニマ)による応援ライブ。「ともに」「やってみよう」など全5曲を披露し、会場のボルテージは最高潮に達した。
終盤では、ブレイクビーツ・ユニットのHIFANA(ハイファナ)が、「パラスポーツの音(ノイズ)」で創作した新たな音楽を実演。その背後のスクリーンに映し出されたデジタル映像は、リオパラリンピックの名シーンや、振ると音が鳴るメダルなどを独自の手法で紡ぐというユニークな内容だった。イベントの最後を飾ったのは、ロックバンドWANIMA(ワニマ)による応援ライブ。「ともに」「やってみよう」など全5曲を披露し、会場のボルテージは最高潮に達した。
興奮冷めやらぬラストは、出演者一同がステージに立ち、「ピョンチャンパラリンピック、応援よろしくお願いします!」(須藤選手)、「一緒にパラリンピックを盛り上げましょう!」(木下氏)など、各自が想いを述べ、イベントは幕を閉じた。
間近に迫るピョンチャンパラリンピック冬季大会の開幕を祝福すると共に、そこで戦う日本選手たちの活躍に絶大なエールを送るかのようなスペクタクルなパラフェス。今年逃した人は、来年ぜひ足を運んでみて欲しい。
写真・映像提供:日本財団パラリンピックサポートセンター