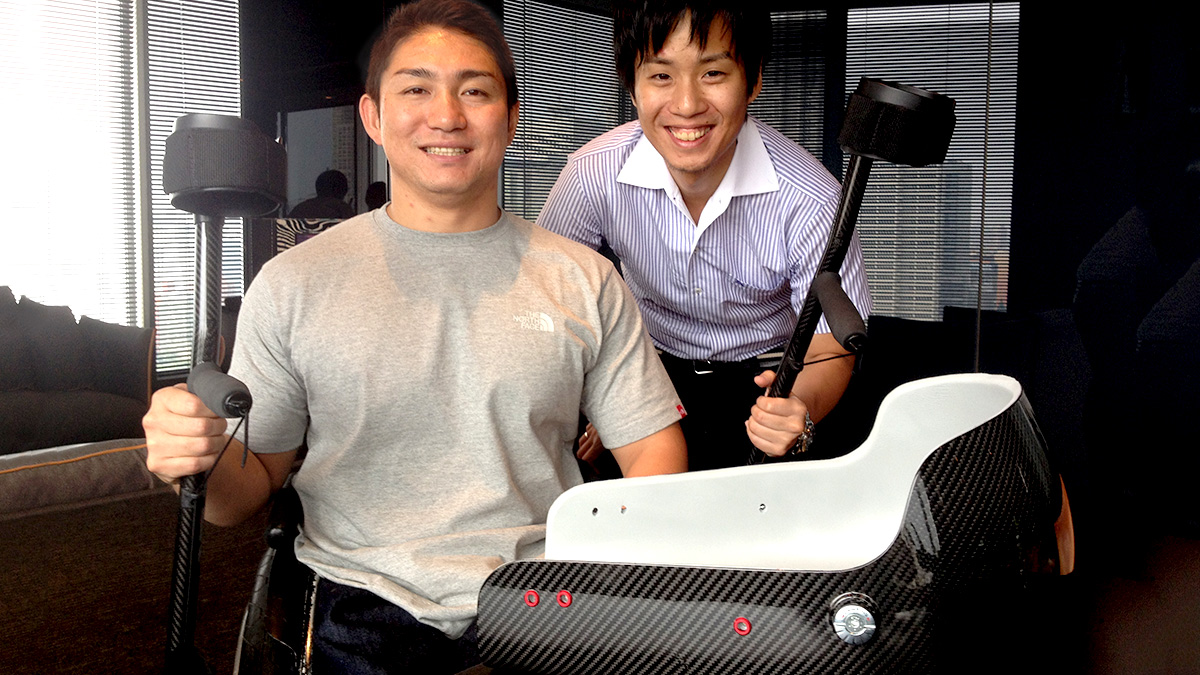
世界へ挑戦するパラスポーツのトップアスリート(Challenged Athlete)と、彼らを陰で支える人々(With)に、スポーツキャスターの長島三奈さんが迫る番組『With チャレンジド・アスリート ~未来を拓くキズナ~』(BS朝日)の2月24日(土)放送回に、チェアスキー界のスーパーヒーロー森井大輝選手と、HERO X 編集長であり、RDS社の専務取締役兼クリエイティブ・ディレクターを務める杉原行里(あんり)が登場する。
『With チャレンジド・アスリート ~未来を拓くキズナ~』は、幾多の困難を乗り越えて、戦い続けるアスリートたちの“強さ”と、彼らを陰で支える者たちの静かな“情熱”に迫る番組。2月24日(土)放送回では、開幕まで15日を切ったピョンチャンパラリンピックでパラアルペンスキーに出場する森井大輝選手と、彼のチェアスキーのシート開発を手掛ける杉原行里が、究極のシートを実現するために奮闘する軌跡が描かれている。
森井選手は、パラリンピック過去3大会連続で銀メダルを獲得し、ワールドカップでは2年連続総合覇者になるなど、めざましい功績を残してきた。スピード・技術共に世界トップの実力を誇るが、唯一、パラリンピックの金メダルだけ手にしたことがない。

「どうしても金メダルが欲しい」。その一心で、日々トレーニングを重ね、ピョンチャン大会に向けて万全の態勢を整える森井選手。そして、杉原が手掛けるシートは、森井選手の体の一部となり、雪上を共に疾走するチェアスキーの心臓部。彼の体にジャストフィットするよう、二人はさまざまな意見交換をしながら、モーショングラフィックや3Dプリンタなど、RDS社が得意とする最先端技術を駆使し、シート開発にあたってきた。1mm単位でシートの厚みを変えるなど、海外遠征のたびに重ねてきた細部へのこだわりは、まさしく最前線で戦い続ける森井選手の“強さ”と、陰で支える杉原の静かな“情熱”の融合だ。
全ては、世界王者が最高のパフォーマンスを発揮するために。明日2月24日(土)朝9:00、BS朝日の放送をぜひお見逃しなく。
森井大輝(Taiki Morii)
1980年、東京都あきる野市出身。4 歳からスキーを始め、アルペンスキーでインターハイを目指してトレーニングに励んでいたが、97年バイク事故で脊髄を損傷。翌年に開催された長野パラリンピックを病室のテレビで観て、チェアスキーを始める。02 年ソルトレークシティー以来、パラリンピックに4大会連続出場し、06年トリノの大回転で銀メダル、10年バンクーバーでは滑降で銀メダル、スーパー大回転で銅メダルを獲得。その後もシーズン個人総合優勝などを重ねていき、日本選手団の主将を務めた14年ソチではスーパー大回転で銀メダルを獲得。2015-16シーズンに続き、2016-17シーズンIPCアルペンスキーワールドカップで2季連続総合優勝を果たした世界王者。18年3月、5度目のパラリンピックとなるピョンチャンで悲願の金メダルを狙う。トヨタ自動車所属。
杉原行里(Anri Sugihara)
1982年生まれ。株式会社RDS専務取締役、クリエイティブ・ディレクター、HERO X 編集長。RDS社先代社長の父の入院をきっかけに、医療福祉機器の開発を始める。彼が製作したドライカーボン製の松葉杖が頑丈かつ世界一軽いとヒットし、注目の的となる。近年では、チェアスキーをはじめとするパラリンピック選手のマシンや医療福祉機器の開発のほかに、最先端ロボット開発、スポーツ用品の製作にも同社の技術が活かされている。
BS朝日 With チャレンジド・アスリート ~未来を拓くキズナ~
”Athlete” 森井大輝(パラアルペンスキー 日本代表)
”With” 杉原行里(RDS社 専務取締役)
2月24日(土)朝9:00~9:30放送
http://www.bs-asahi.co.jp/with/
(写真提供:BS朝日)