物流業界で急速に進んでいるテクノロジー化。その背景には、ここ数年で急激に成長したE-コマースの存在がある。消費者が1つのアイテムを通販でいつでもどこでも取り寄せることができる時代。大量で小ロッドのアイテムが行き来する時代に、倉庫ビジネスと配送の仕組みも、もはや従来通りにはいかなくなっている。AIやロボットを活用した物流改革は、今後どこまで進むのだろうか。物流施設の改革に取り組むGROUND株式会社の宮⽥啓友社長に、編集長・杉原が物流の未来を聞く。 ・コストのかさむコンベアとはさようなら ・めざすは物流倉庫のシェアリングモデル ・ロボット開発はビジョンを共有できるパートナーと
コストのかさむ
コンベアとはさようなら
杉原:いま、物流施設では、ハウスウェアデザインなどが進んでいる状況なのでしょうか。
宮田:突き詰めていうと、我々のPEER(ピア)(自律型協働ロボット)は、コンベアの代替にもなり得ます。いままではピッキング作業をしたら、かごをコンベアに載せて、梱包工程までガタガタ運んでもらうのが一般的でしたが、PEERは梱包工程まで自律的に移動しますから、コンベアが不要と言えます。実は、コンベアは1メートル40万円くらいするんです。物流施設を作ると必ずコンベアが必要なので、そこがこれまでは利益の源泉だったんですね。
杉原:それをなくすというのは、大変な戦いですね。

宮田:コンベアは施設の制約にもなります。メインストリームとしてコンベアが敷かれると、そこを横断できなくなるので、迂回する通路を作らなければいけない。でも、PEERのような自律型協働ロボットを導入すると、ビルの一室を物流センターにすることも可能です。従来は物流センターのための建物が求められたのですが、AIやロボットなどの先端テクノロジーを活用すれば、都心の地下駐車場、学校、百貨店、ガソリンスタンドなど、有閑スペースや資産を活用できる。アメリカではマイクロフルフィルメントセンターといって、小型の物流センターが少ずつイノベートされてきています。今後、物流業界には大きなパラダイムシフトが起こると思っています。1つの物流センターを作るために20億かけるという時代ではなくなっていくでしょう。
杉原:GROUNDさんの自律型協働ロボットですが、人間との協働がポイントではないかと思います。なぜ協働にフォーカスされているのでしょうか。
宮田:これはAmazonのジェフ・ベゾス氏も明言していますが、倉庫の完全自動化はあと10年は難しいと思います。仕組みとしては無人化できるのですが、やはり取り扱う商品の制約が出てしまう。ECで扱う商品は長尺のものもあれば、小さいものもあります。それを一つの概念で処理しようとすると、非常にムダが多くなる。なので、投資対効果が見合わない。ロボットが自動で次工程まで動いていくから、人は歩く必要はありません。ただ、例えばピンポイントでスカートをピックするというのは、ロボットにはまだできません。
このように人間が得意なこと、人間にしかできないことは人が行い、ロボットが得意なことはロボットに任せる、という協働という形が現時点では最も生産性を向上できると考えます。

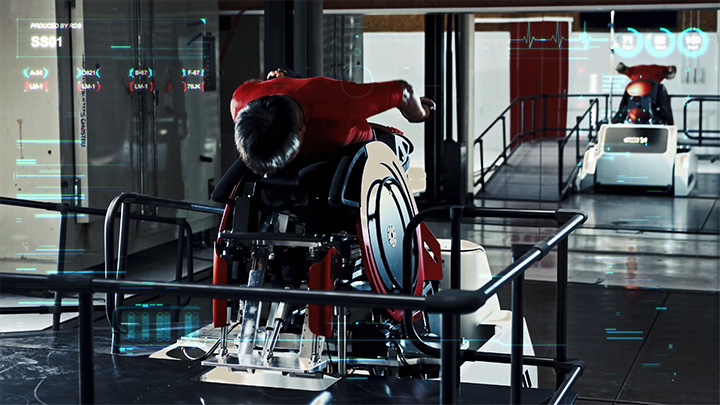
人とGROUND社のロボットが協働する様子。作業者は同社のロボット「PEER」に付属するタブレットの案内に従い、指定の商品をピックアップする。
杉原:そうですね。SLAM(Simultaneous Localization and Mapping:センサーによって周囲環境を把握し、マップをつくりつつ、取得したデータをもとにロボットの自身の位置も推定する技術)で1センチ以内の誤差に収めるというのはとんでもない技術なので、キャリブレーションがかなりできていないと厳しいですよね。
宮田:工程ごとにロボットと人間の強みを分解して、人がやるべき作業、ロボットがやるべき作業を選別することが大切です。
杉原:つまり、ロボットと人間、双方のインテリジェンスやアビリティを掛け算しているんですね。補完ではなく拡張。これっていまの世の中にすごく合っていると思います。僕自身は今後ロボット化が進むことで、人間の本来使える時間が増えて、幸せだと思っているのですが、一方でAI化やロボット化で仕事を奪われると言うかたもいます。そこに協働があると、雇用が生まれるという考え方もできる。倫理的なバランスもいい。車もまさにそうで、自動運転化しても、やはりドライバーズシートには人が乗っていて、ステアリングがあるというのと同じではないかと思います。
宮田:近いですね。おっしゃる通り、物流業界の中を完全に無味乾燥なテクノロジーの世界にしていくという考えではありません。ECは伸びていますから、全体的に求められる人手は増えています。その中で、人がやらなくても良い過酷な労働や、業務・作業はロボットに任せる。こういった考えの下、物流業界を持続可能なものにしていくことが大前提です。
めざすは物流倉庫の
シェアリングモデル
杉原:宮田さんはやはり顧客ニーズというか、課題がかなり明確ですよね。今までご経験されたものが根幹にあると思うのですが、そういったご経験から起業を決意されたんですか。それとも、もともと事業のビジョンがあったのでしょうか。
宮田:楽天には7年間勤めたのですが、三木谷さんと一緒にずっとやってきて、Amazonと戦っていくうえでは、自社物流をやらないといけないという気持ちをもっていました。最終的には、当時は自社物流の構築を見送るという経営判断がくだされました。
オープンな物流プラットフォームの重要性と将来性は当時から強く感じていたので、1年準備をして、GROUNDを設立しました。創業メンバーも楽天時代の仲間です。

杉原:今後、AIがディープラーニングをしていった時に、どういう変革が起きますか? 例えば時間が圧倒的に短縮されることをめざしていくのか、それともまた違う展開がありますか。
宮田: ECは波動(物流量の偏り)が大きい業界です。週や月、年間を通した傾向もあります。アスクルは新年度の動きが大きかったですし、アパレルはクリスマスシーズンが伸びます。従来の物流投資というのは、会社の成長を見据えながら、この波動のてっぺんの部分をある程度想定してやっていきます。ですから、最初は投資した中で全体のキャパシティが6割くらいしかなくて、4割くらいはずっと空いている中で成長していきます。ということは、ムダがあるんです。一方で物流の設備は非常に流動性が高まっていて、先ほどの自律型協働ロボットなどを使った施設では、シェアオフィスしやすい。1つの建物の中に波動がかぶらないテナントを誘致すれば、ロボットや人を柔軟にシェアできる、あるいは建物自体も含めてシェアができる。最終的にめざしているのは、いわゆるサブスクモデルですね。利用・シェアした分だけ重量課金していく。もはや、そこでは自社の物量のキャパシティなんて考える必要はない。そこは、我々のAI物流ソフトウェアDyAS(ディアス)がブレーンとなり、様々な解析をして全体最適化を図ります、という形です。

杉原:まさにシェアリングエコノミーですね。一方で、いま、長崎でドローン配送が始まるなど、自動配送、遠隔操作の流れがあります。この潮流は、宮田さんから見ていい方向ですか?
宮田:いい方向ではあるのですが、物を運ぶ上でドローンやロボットを使う前に、やることはあると思います。例えば、ヤマト運輸が3年前に大きく一斉値上げしたのは、従来のCtoCの小包や宅急便が増えたのではなく、Amazonを中心とするECの物量がなだれこんできて、その需要予測ができないために、配車計画が立てられなくなったからです。なにが言いたいのかというと、配送会社に対してある程度精度の高い情報を提供できれば、彼らはそれに基づいて合理化ができるんですね。
杉原:ええ、間違いないですよね。
宮田:それができていない。我々がなぜサプライチェーンの真ん中の物流施設に力を入れているかというと、ひとつには上流工程のデータと配送側のデータが連携していないことで膨大なムダが起きているからです。国交省のデータを見ればわかりますが、実はドライバー不足といいながら、いま全国の営業車両の積載率は4割です。ですから、我々はDyASを使って、あるいは次世代物流センターを普及させることによって、出庫を精度高く予測し、その情報をリアルタイムに近い形で配送会社に対して提供していき、全体の最適化を進めていきたいんです。
ロボット開発はビジョンを
共有できるパートナーと
杉原:HERO Xの読者にはロボットを開発している人も多いので、ロボットで御社に参入できるか?ということが気になると思います。もしくは御社と一緒になにかやることは可能なのでしょうか?
宮田:実際にこのPEERという自律型協働ロボットを物理的に開発しているのは、中国の大手ロボットメーカーです。彼らはビジュアルスラムと制御系の技術に優れているので、本当に性能の高いロボットを開発できます。でも、我々はグローバルで主要なロボットベンチャーメーカーと接触しているのですが、99%物流現場では使えません。なぜかというと、ロボットエンジニアは物流のことがわからないからです。大事なのは本当に実務レベルで使えるものに仕上げられるかということ。彼らには物流の経験も専門知識もないので、我々はそのノウハウを提供する。おそらく、そういう開発になっていくと思います。
杉原:ということは、パートナーは特化した考え方を共有でき、かつ違いの強みを生かせる会社ということですね。
宮田:そうですね。例えばこの中国の企業はビジュアルスラムに非常に優れているけれど、右から左にピッキングするための技術はもっていない。じゃあ、ピッキングのロボットについては、アメリカのSoft Robotics社と提携する、という形ですね。
杉原:そのピッキングは、遠隔操作にならないんですか。
宮田:将来的には十分それは可能だと思います。
杉原:そうしたら、在宅の仕事になりますよね。
宮田:その通りです。そうすると、別に日本である必要もなくなる。
杉原:24時間回せますもんね。
宮田:それを監視するだけでも十分なニーズがあると思います。
宮⽥啓友(みやた・ひらとも)
株式会社GROUND 代表取締役社⻑/CEO
上智⼤学法学部卒。1996年 株式会社三和銀⾏⼊⾏。2000年 デロイトトーマツコンサルティング(現:アビームコンサルティング)⼊社。⼤⼿流通業を中⼼にロジスティクス・サプライチェーン改⾰のプロジェクトに従事。2004年 アスクル株式会社⼊社。ロジスティクス部⾨⻑として⽇本国内の物流センター運営を⾏う。2007年 楽天株式会社⼊社。物流事業準備室⻑を経て2008年 物流事業⻑就任。2010年 楽天物流株式会社設⽴、代表取締役社⻑就任。2012年 楽天株式会社執⾏役員物流事業⻑就任。同年フランスのフルフィルメントプロバイダAlpha Direct Services SASを買収し、マネージングディレクターを兼務する。2013年アメリカのフルフィルメントプロバイダWebgistixを買収。2015年4⽉ GROUND株式会社設⽴。