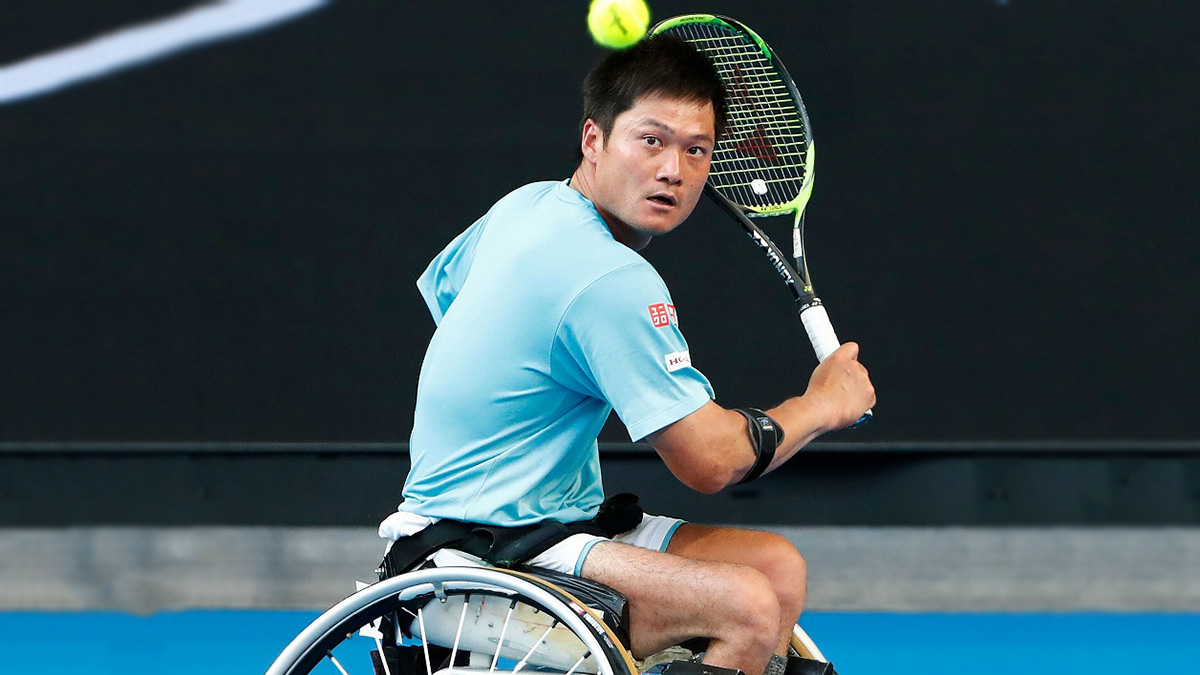
2018年1月27日にメルボルンで行われた全豪オープンで、2年4ヶ月ぶりとなる男子シングルス優勝を果たし、グランドスラム車いす部門男子歴代最多の47勝(シングルス25勝、ダブルス22勝)の記録を更新した車いすテニスプレイヤー、国枝慎吾選手。ここ数年、右肘の怪我により、戦線離脱を余儀なくされていたが、不屈の精神で苦境をみごとに乗り越え、新たな歴史を刻み始めている。5度の年間グランドスラムを達成してきた絶対王者は、今、何を思うのか。これまでとこれからを探るべく、国枝選手に話を伺った。
自分が変わる過程を楽しみながら、フォーム改造

今年1月に行われた全豪オープン男子シングルス決勝戦で、国枝選手は、フランスの宿敵、ステファン・ウデ選手とフルセットに及ぶ激闘を繰り広げた。両者一歩も譲らず迎えた第3セットは、ウデ選手が5-2でリード。窮地に追い込まれるも、国枝選手は、驚異の粘りで追い上げていった。3本のマッチポイントをしのぎ、タイブレークに持ち込んだ最終セットは、最も得意とするフォアハンドでチャンピオンシップポイントを勝ち取り、2時間41分に及ぶ戦いの末、逆転勝利を収めた。
「四大大会を20回以上勝っていますが、今回が一番嬉しかった。それだけ辛い時期が長かった」――。試合後の会見で国枝選手はこう語った。2016年4月、右肘の手術を受けたのち、ツアーに復帰したが、6月に痛みが再発。金メダル獲得を期待されていたリオパラリンピックの直前まで実戦からは遠ざかり、調整の日々が続いた。痛み止めを打って臨んだ同大会のダブルスで銅メダルを獲得した後も、11月に再び痛みがぶり返したため、やむを得ず、半年以上もの間、ツアーを離れることになった。そんな紆余曲折を経て、再び勝利を手にするまでには、人知れず地道な努力があった。
「右肘の怪我は大変でしたが、同じことを繰り返さないために、2017年の1年間をかけて、フォームの改造に取り組んできました。例えば、バックハンドを打つ時に手首を曲げると痛みが出るので、曲げずに打てるよう、ラケットのグリップ(握り方)も変えましたし、自分自身が変わっていく過程を楽しみながら、フォームについてはすべてを変えていった感じです。それが全豪オープンで実を結んだかなと思います。まだすべてが完成したわけではないので、これからさらに磨きをかけていきたいです」
道具を使うスポーツだからこそ、
今度は道具を掘り起こしていく

フォームの改造に加えて、2017年11月には、競技用車いすとラケットも変えた。従来のものより約3cm高くした車いすの座面は、必要に応じてその場で調整できる仕様になっている。
「各国の選手が車いすにこだわりを持ち始めて、“自分もこのままではいけない”という危機感もあって、昨年くらいから、さまざまなポジションを試すようになりました。車いすの座面をほんの5ミリ、10ミリずらすだけで、体の動きは大きく変わってきます。どの角度で乗るのがいいのか、車いすのフレームに対してどのポジションに座ればいいのか、試行錯誤を重ねた末、今のセッティングにたどり着きましたが、果たしてこれがベストかといえば、それは分かりません。例えば、フレームの素材が変わったり、軽量化されることで、重心もまた変わってくることが考えられますし、“車いすは、何がベストなのか分からない”というのが、正直なところです。これは、僕だけでなく、他の選手も同じように感じていることだと思います。ただひとつ言えるのは、車いすテニスはタイムを競う競技ではなく、いかに自分の力を効率良くボールに伝え、運んでいくかということが肝なので、思い通りに体を動かすことのできるものであることは、極めて重要だと思います」
この2月に34歳の誕生日を迎えた国枝選手。「以前は、どちらかと言うと、自分の体を鍛え上げることにこだわっていた」と話す。
「体をさらに改造していくことは、年齢的に考えても、そこまで現実的ではないところがあります。車いすテニスは、道具を使うスポーツであるがゆえに、これからは、道具の方を掘り起こしていこうという意識です。今の車いすに変えてから、2ヶ月後くらいに全豪オープンに出場しましたが、結果も出せましたし、道具を見直すことは、より良いプレーをするために無関係ではなく、むしろ重要だということを改めて実感しました」
なお、ラケットについては、2017年7月から試していたYONEX(ヨネックス)とのテニス用具使用契約を正式に締結。2017年11月にイギリスで開催された車いすテニスマスターズ大会より、そのラケットで戦っている。
「より強い選手になりたい」が僕の原動力

2004年アテネ大会より4大会連続でパラリンピックに出場し、通算3個の金メダルを獲得した国枝選手は、東京2020での金メダル獲得を公言すると共に、「自身の競技人生の集大成としてだけでなく、障がい者スポーツの転換点にしたいと考えている」と語る。その転換点とは、一体、何を意味するのだろうか。
「一番大事なことは、パラリンピックが、本当の意味でスポーツとして発展していくことだと思います。スポーツとしてエキサイティングなものであれば、おのずと盛り上がるでしょうし、そうでなければ、その逆になると。これは極めて自然なことだと思います。僕は、数あるパラリンピックのスポーツの中でも、車いすテニスが、最もエキサイティングなスポーツだと自負しています。それをお客さんに観ていただきたいですし、プレーを通して、このスポーツの興奮や迫力や熱を伝えたい。ただ伝えるだけでなく、それらが観る人にきちんと伝わるということを実現したいなと思っています」
フォームを変え、車いすやラケットのギアを変え、自分をさらに研ぎ澄ますべく“大改革”を行い、新たなスタートを切った今、国枝選手が見つめる先とは――。
「東京パラリンピックで金メダルを獲得することは、言うまでもなく光栄なことですが、やはりテニス選手としては、グランドスラムを目標に、日々、鋭意努力しているので、“今の目標は、何ですか?”と聞かれたら、それは、全仏オープンであり、その次の全米オープンで、最高のパフォーマンス力を発揮することです。もちろん勝つことはすごく嬉しいことですけれど、勝っても、それほど満足しません。より強い選手になりたいと思いながら取り組んでいますし、それが僕の原動力にもなっています」
「自分自身のパフォーマンスをアップデートしていくことが、すごく楽しい」と自らが話すように、“新生・国枝慎吾”がどんな記録を更新していくのか、今から待ち遠しくてならない。

国枝慎吾(Shingo Kunieda)
1984年2月21日生まれ。9歳の時、脊椎損傷のため車いすの生活となる。11歳から車いすテニスを始める。2004年アテネパラリンピックのダブルスで金メダルを獲得。2006年10月、USオープンで2つ目のグランドスラムタイトルを獲得し、アジア人初のシングルス世界ランキング1位の座に輝く。2007年、アジア人初の世界チャンピオン、車いすテニス史上初となる年間グランドスラムを達成。2008年北京パラリンピックのシングルスで金メダル、ダブルスで銅メダルを獲得。2009年4月には、車いすテニス選手として日本初のプロ転向を宣言。2010年11月マスターズ戦での敗北まで、車いす男子シングルス連勝記録は107勝。男子車いすテニス初の4年連続世界チャンピオン達成。USオープン時に痛めた右肘の影響で、その後、戦線離脱を余儀なくされるが、2012年5月のジャパンオープンで復帰し、9月に行われたロンドンパラリンピックでは前人未到の2大会連続金メダルを獲得。2015年、5回目の年間グランドスラムを達成。右肘手術からの復活を遂げた2018年全豪オープンでは、2年4ヶ月ぶり9度目の優勝を果たし、グランドスラム車いす部門男子歴代最多の47勝(シングルス25勝、ダブルス22勝)を更新。2020年東京招致のアンバサダーを務め、障がい者スポーツの普及活動のキーパーソンとしても期待されている。ユニクロ所属。
国枝慎吾公式サイト
http://shingokunieda.com/
[TOP画像:©IMG]