イタリアで開催された世界最高峰の国際デザインコンテスト「A’ Design Award & Competition 2020-2021」。メディカルデバイス・医療機器部門でゴールドを受賞したRDS開発の『Gait Analysis Robot Medical Health Measurement System』は、普段通りに歩くだけで歩行の解析ができるという画期的なプロダクト。国内外の医療業界からの注目も集まり始めているこのプロダクトだが、一つだけ欠点が。「名前が長くて覚えられない」。この欠点を拭うため、あるアーティストが立ち上がった。
歩行を計測、観察することで、その人の体のコンディションを分析、さらに数値を使って可視化することで、誰もが気軽に理解できる情報を提供することを目的に作られたはずのロボットにしては、その名前が少々複雑すぎる、そんな欠点を抱えたまま、世界最高峰の国際デザインコンテストに臨んでいた。この話を聞きつけ、名付け親として手を挙げてくれたのがGAKU-MC(ガクエムシー)だ。1990年代に日本ヒップホップ界に大きな影響を与えたEASTENDを結成、爆発的なヒットを遂げた『DA.YO.NE』をはじめ、多くの曲を生み出したレジェンドである。

GAKU-MCがパーソナリティーを務めるJ-WAVEラジオ番組にRDS代表の杉原がゲスト出演したことをきっかけに、ネーミングをお願いすることが決定、言葉を操る魔術師GAKU-MCがつけた名前は『CORE-Ler』(コアラー)だ。
彼曰く、「CORE」は体の“コア”を調べてくれるかわいいやつ! 「Ler」はポルトガル語で読む、解読するという意味を持ち、歩行解析ロボットにはもってこいのネーミングだ。実はRDSのプロダクトは動物に由来した名前が多く、今回も思いがけずに「コアラ」となった。「GAKUさん最高!! 本当にありがとうございます」と杉原は興奮した様子で話している。

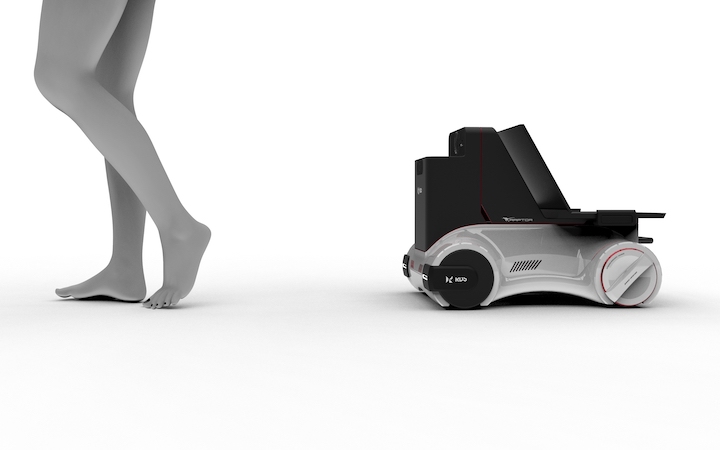
体に計測器をつけることなく非接触の状態で歩き方を測れるため、より普段通りの歩きを解析することが可能になった。歩行の変化はいくつかの病気において、早期に発見したり、進行具合を見るのに役立つ可能性があるとされている。
例えば、認知症。ひとくくりにされがちの認知症だが、実はいくつかの型に分かれている。最も多くみられるのがアルツハイマー型で、認知症=アルツハイマーと認識する人も多い。しかし、実際は複数の型が存在し、症状の出方も少しずつ違う。アルツハイマーに次いで多いのがレビー小体型認知症と呼ばれるもので、こちらは一般的な認知症のように徐々に物忘れが激しくなるというよりも、物忘れの度合いにムラがある。幻視症状のほか、寝ている時に大きな声で叫ぶなど、睡眠中の異常行動などがあげられるが、手足の震えや筋肉のこわばりなど、パーキンソン症状を伴うこともあるため、パーキンソン病と間違われる場合もある。
イギリスのニューカッスル大学の研究チームは、認知症の型により、歩行パターンに違いが見られることを発見、歩行によって認知症のパターンを区別することができる可能性があると公表した。研究チームが発表した論文によれば、レビー小体型認知症の患者の場合、歩数や歩幅などが頻繁に変化、左右のステップ時間や歩幅なども非対称という特徴があるという。今回の実験はセンサーを備えたマットの上を歩くというものだった。『CORE-Ler』はマットの上だけなどという規定がないため、自由に歩いてもらう中から必要な歩行データを取得することができるため、より顕著な違いが見つかるかもしれない。親しみやすい名前のついた歩行解析ロボットの今後の展開を見守りたい。
GAKU-MC(ガクエムシー)
ラッパー。東京都出身。アコースティックギターを弾きながらラップする日本ヒップホップ界のリビングレジェンド。
1990年 学生時代の友人と共に後の日本ヒップホップ界に大きな影響を与えるグループとなる”EASTEND”を結成。1994年”EASTEND X YURI”名義として『DA.YO.NE』でヒップホップ初のミリオンセラーを記録。また紅白出演を果たす。1999年ソロ活動開始。2011年レーベルRap+Entertainmentを立ち上げ、“ラップで世界をプラスの方向に!”を合い言葉に活動。2012年キャンドルと音楽で心を繋ぐ音楽イベント“アカリトライブ”を立ち上げ、音楽による日本復興活動を続けている。また同年、音楽とフットボールという世界二大共通言語を融合し、人と人を繋げていくことを目的とした団体【MIFA (Music Interact Football for All)】を立ち上げる。2013年 自身の音楽活動と平行し僚友 桜井和寿(Mr.Children)とウカスカジー結成。2014年 日本サッカー協会公認 日本代表応援ソング制作。アルバム“AMIGO”/ウカスカジー (2014年6月11日発売)。2016年12月から2017年2月にかけて家族で世界一周の旅を経験。2018年ウカスカジーとして2014年に続き、「サッカー日本代表公式応援歌」も歌う。2018年10月には日本全国22カ所をキャンピングカーで周るLIVEツアー「キャンピングカーであなたの街へ GAKU-MC LIVE TOUR 2018 Rappuccino」を40泊のキャンピングカーでのツアーを完遂。2019年キャンピングカー協会アンバサダーに就任。ソロデビュー20周年ツアー完遂。2020年6月ニューアルバム「立ち上がるために人は転ぶ」をリリース。2021年4月コロナ禍の中、今できる最良な音楽の届け方を模索し、楽器、音響機材、照明、物販、寝具、衣装、食料、そしてサーフボードを1台の キャンピングカーに詰めこみ、東京から宮崎まで、11 会場を約1ヶ月かけて、ツアー「キャンピングカーであなたの街へ GAKU-MC × 東田トモヒロDRIVE AND LIVE TOUR 2021 THE DAY」を完遂。
ソロとしてこれまでに9枚のオリジナルアルバムと1枚のベストアルバムをリリース。
最新アルバムは【立ち上がるために人は転ぶ】 。エッセイ “世界が今夜終わるなら”。
Rap & Travel DVD 【トラベルノート】。
現在は年間約60本のライブに出演する傍ら、レギュラーラジオ番組(J-WAVE)、TV出演や作詞作曲など作品提供を行う。2021年 さらなるチャレンジを掲げ旅と音楽、そして大好きなフットボールをテーマに活動中。
http://www.gaku-mc.net
関連記事を読む







































