車いす同士がぶつかり合う猛烈なコンタクトプレーで知られるウィルチェアーラグビー。選手たちがタックルを繰り返す度、コートには無骨な衝突音が鳴り響き、車いすごと吹っ飛び、転倒するとさらに激しい重低音がとどろき渡る。「マーダーボール(殺人球技)」や「車いすの格闘技」とも呼ばれるこの凄まじい競技において、日本代表チームは、2016年リオパラリンピックで強豪カナダを倒し、銅メダルを獲得した。我が国史上最強と評されるチームの主幹をなすのが、「世界の猛者6人」の1人と国際パラリンピック委員会が発表し、今や、世界の強豪国がマークする天下無双のポイントゲッター・池崎大輔選手。チーム一丸となって、東京2020で金メダル獲得を狙う池崎選手に話を伺った。
嬉しさ半分、悔しさ半分。
だって1位じゃないから

リオパラリンピックの3位決定戦では、ウィルチェアーラグビー発祥の国であり、過去3大会でメダルを獲得した強敵カナダと対戦した日本代表。2点差、3点差を行き来する接戦の中、池崎選手は、破竹の勢いで多くの得点を決め続けた。彼が自陣でボールをキープしたまま、会場にはブザーが鳴り響き、試合終了。その合図と共に、ボールを宙に高く打ち上げると、キャプテンの池透暢(いけ・ゆきのぶ)選手がタックルの勢いで走り寄り、2人は抱き合って勝利に歓喜した。4大会連続の出場で、初めて手にした悲願の銅メダルだ。
「勝った時に仲間と喜びを分かち合えたのが、一番楽しい瞬間でした。でもその感動は一瞬です。リオでの結果は、嬉しさ半分、悔しさ半分。だって、1位じゃなくて3位ですから。目指すところには、まだたどり着けていないわけです」
リオ大会直前の7月中旬に行われた合宿中に、右掌の舟状骨を骨折するというアクシデントに見舞われた池崎選手。だが、その事実は一切公開せず、骨折部分をボルトで留めた状態で本番に挑んだ。
「8月はほとんど(練習やトレーニングを)やらなかったし、現地での練習試合にもほぼ出ていない。葛藤はもちろんありました。1ヶ月も休んだら、アスリートとして終わりじゃないですか。でも、ロンドンでの悔しさをバネに4年間やってきた中で、出場しないという選択肢は僕の中になかったし、今ここで諦めたら、また4年後までのモチベーションは、絶対に保てない。痛ければ、痛み止めを打てばいいし、大会の後にどうなってもいいやと思っていました。チームとしても、“池崎がいなくても、チームとしていかに強くなるかを考える。池崎が戻ってきた時にさらに強くなる”というポジティブな体制でいてくれました。良かったのは、みんなのやる気が、俄然増したことです」
「もしかすると、池崎選手が骨折したことによって、銅メダルが獲得できたのでは?」と尋ねると、「多分、折ったから獲れたんじゃないですか(笑)。もし折れていなかったら、金を獲れたかもしれないけれど。結果的には、良い方向に行けたんじゃないかなと思います。
リオから帰ってきて、友人や会社に勝利報告をしに行くのが楽しみの一つでした。また会社で実施してくれたパブリックビューイングの様子を映像で見た時には、社内の応援に声に胸が打たれました。今でも感動しますが、でもやっぱりそれは過去のことになってしまったんです」
世界に1台。
チェアスキル&スピード重視の
ラグ車“池崎モデル”を愛用

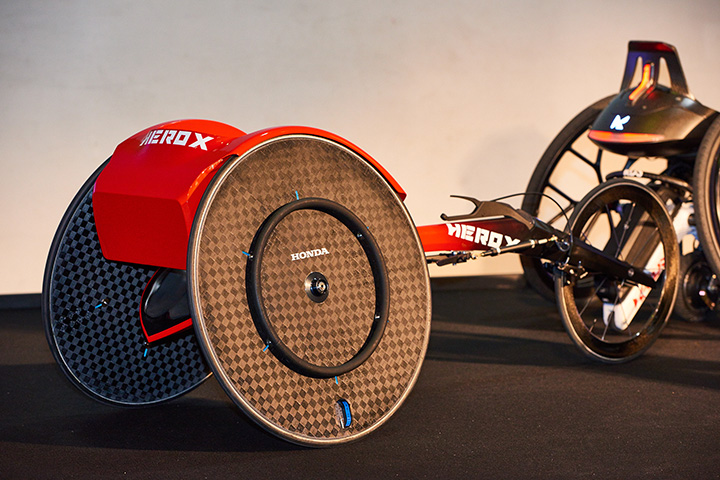
「ウィルチェアーラグビーは、勝つか負けるかの真剣勝負。楽しいという概念は、僕には必要ない」と池崎選手はきっぱり言う。「綺麗さなんかいらない。泥くさくていい。男くさくていいんですよ。男らしい競技だと思っているので。だから、汚れて傷だらけのラグ車がすごく好きなんです」。ラグ車とは、ウィルチェアーラグビーの競技用車いすのこと。現在、池崎選手が使用しているラグ車は、チェアスキルやスピードを重視したハイポインター用のカスタムメイドだ。
ラグ車そのものは、アメリカのメーカーが手掛けているが、リオ大会前から、バケットシートの開発は、世界中のトップアスリートが慕う大阪のアニキ技師こと、川村義肢株式会社の中島博光さんに依頼している。中島さんといえば、チェアスキー界をけん引する日本の強豪選手のシート開発で知られる名手。ウィルチェアラグビーのシート特有のこだわりは、どんなところにあるのだろうか。
「形は、チェアスキーと一緒ですね。ただ、ウィルチェアーラグビーの場合、衝突、転倒などがあるので、強度も踏まえたカーボン素材を選んでいます。僕のシートは、樹脂(ウェットカーボン)製です。自分が求めているパフォーマンスという視点で言うと、操作性や当たりの強さはやっぱり(オーダーで作ったラグ車の方が)断然良いですね。今、ちょっと攻めた仕様の改良を加えていただいた新車が中島さんのところにあって、近々、2泊3日で試乗に行く予定です。セッティングは、すぐにできるものではなく、乗って走ってを繰り返すことで見えてくるので。東京2020に向けて、さらに精度を上げて、しっかりしたものに仕上げていきたいと思っています」
ラグ車は“しつけ”が肝心!?

「新車は綺麗すぎて、乗るのが恥ずかしい」と言う。だが、2~3試合を終える頃には、最大衝撃値が20G、30Gとも言われる強い衝突などによって、池崎選手好みの“汚れて傷だらけのラグ車”へと姿を変えていく。
「手や頭が間に挟まったら、多分、ぺしゃんこになると思います。僕は、バケットシートと車いすにスプリングを入れています。強い衝突があった場合は、それで吸収されて少し戻る仕様になっています」
強靭なラグ車は、猛者たちの良きパートナー。強者同士がタッグを組めば、まさに「向かう所敵なし」。だが、その境地にたどり着くまでには、多くの時間と根気を要する。
「ラグ車って、1対1でちゃんとしつけをしておかないと言うことを聞いてくれないんです。乗せられているようじゃ、優れたパフォーマンスは発揮できない。だから、できるだけ多くの時間を一緒に過ごして、可愛がらないといけない。しかも、やきもちを焼くので、予備を用意するのはダメ。1台だけ労を厭わず、可愛がるんですよ」
後編では、池崎選手の心に強く刻まれた「東京2020で金メダルを勝ち取るために、達成すべきこと」にスポットを当てたインタビューをお届けする。

池崎大輔(Daisuke Ikezaki)
1978年1月23日生まれ。北海道函館市出身。6歳の時、末梢神経が侵されて筋力が低下する進行性の神経難病、シャルコー・マリー・トゥース病と診断される。17歳の時、車いすバスケットボールを始める。2008年ウィルチェアーラグビーに転向し、2009年北海道Big Dippersに入団。2010年4月、日本代表に選出され、8月の世界選手権(カナダ)では3.0クラスのベストプレイヤー賞を受賞し、代表チームは銅メダルを獲得。2012年ロンドンパラリンピックで4位入賞、2014年8月の世界選手権(デンマーク)で4位入賞したのち、2015年10月の三菱商事2015 IWRFアジアオセアニアチャンピオンシップで優勝を果たし、リオパラリンピック出場権を獲得。3.0クラスベストプレーヤー賞及びMVPを受賞した。2016年リオパラリンピックでは3位決定戦でカナダを破り、銅メダルを獲得。2016年より三菱商事株式会社に所属。