北京パラリンピックで金メダル2個、ロンドンパラリンピックで銀メダル3個を獲得し、世界の頂点に立つも、引退を表明した車いす陸上スプリンター・伊藤智也選手。今夏、約5年の沈黙を破って、HERO X上で現役復帰を発表し、「57歳で迎える東京2020で金メダル獲得」を目指して、着々と準備を進めている。そんな伊藤選手と共に、RDS社は、エクストリーム・スポーツのマシン開発に精通したエンジニアや気鋭のプロダクト・デザイナーらと「チーム伊藤」を結成し、目下、通称“レーサー”と呼ばれる車いす陸上用マシンを開発中だ。世界に1台のレーサー・伊藤モデルの行方はいかに?今回は、RDS本社で開かれた2度目の研究開発ミーティングのもようをお伝えする。
東京2020に向けて極限まで進化する、
マシンと伊藤智也
本題に入る前に、前回までの内容を少しおさらいしておきたい。9月初旬に行われたキックオフ・ミーティングでは、伊藤選手を囲んで、開発の指揮を執る同社クリエイティブ・ディレクターで、HERO X編集長を務める杉原行里(すぎはら・あんり)をはじめとする「チーム伊藤」の主要メンバー5名が初顔合わせした。5時間以上に及ぶディスカッションでは、車いす陸上という競技そのものやマシンについての質疑応答などが行われたのち、「2018年夏、プロトタイプ完成」を一つの目標に決めた。が、ここで不思議に思う人もいるだろう。東京オリパラの開催は2020年夏なのに、なぜ2年も前にプロトタイプを作り上げるのか?
理由は、主に二つある。まず、乗り心地やポジションなど、選手側からの細かな要望を反映するべく、マシンには、極限のレベルまで改良・調整が加えられていくからだ。RDS社のエンジニアたちは、これまで手掛けてきたチェアスキーのマシン開発を通じて、この段階がいかに重要で、かつ膨大な時間を要するかを熟知している。
もう一つは、伊藤選手がマシンに体を慣らせるために、十分な時間が必要だからだ。とりわけ今回は、自分の体にぴったり合ったオーダーメード・マシンに乗るのは、20余年のアスリート人生の中で、伊藤選手にとって初めての経験であり、新たな挑戦でもある。パラリンピックが「身体と技術の融合」と言われるように、最高のパフォーマンス力を発揮し、勝利を掴み取るためには、自分の体の一部となって共に疾走するマシンと、寸分の狂いなく一体化するレベルに到達するまで、馴染ませていくことが不可欠なのだ。
トップアスリートとの共同開発は、
『感覚の数値化』から始まる
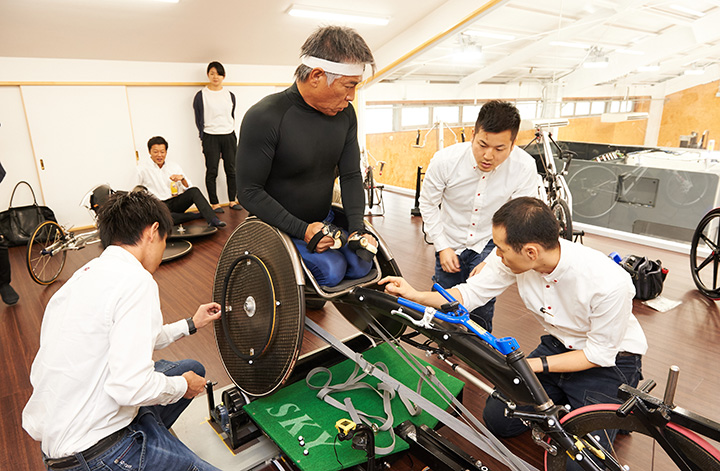 秋晴れの空が美しい10月の朝、チーム伊藤のメンバーがRDS本社に集まり、第2回目となる研究開発ミーティングが行われた。今回、メインとなる課題は「計測」。まず、マシンの“動き”や“しなり”を計測すること。伊藤選手が長年使用してきた長距離用のマシンを3Dスキャナーでスキャンし、走行中の力の分散バランスなども含めた力学的なデータを、モーションキャプチャやフォースプレートを使って計測し、解析していく。次に、伊藤選手の走りを同様の機器を使って計測する。ハンドリムをこぐ時、腕や首、肩などの部位が、どのような角度で、どのように動いているのかということをエンジニアリングの観点から解析していく。
秋晴れの空が美しい10月の朝、チーム伊藤のメンバーがRDS本社に集まり、第2回目となる研究開発ミーティングが行われた。今回、メインとなる課題は「計測」。まず、マシンの“動き”や“しなり”を計測すること。伊藤選手が長年使用してきた長距離用のマシンを3Dスキャナーでスキャンし、走行中の力の分散バランスなども含めた力学的なデータを、モーションキャプチャやフォースプレートを使って計測し、解析していく。次に、伊藤選手の走りを同様の機器を使って計測する。ハンドリムをこぐ時、腕や首、肩などの部位が、どのような角度で、どのように動いているのかということをエンジニアリングの観点から解析していく。
 「往々にして、アスリートと開発側のコミュニケーションは一方通行になりがちです。例えば、“こんな感じになれば、もっといい”と選手が言う時の感覚は、当然ながら目に見えるものではなく、いわば、本人にしか分からない体感的なもの。それらを開発側の僕たちがきちんと理解するためには、『感覚を数値化する』ことが不可欠です。そうすることで、選手の意図をより正確に捉えることができると共に、数値という明らかな指標があれば、伊藤選手と開発チームの互いにとって、現状を把握する助けにもなりますし、ひいては、最大限に力が発揮できるマシンの開発に活かすことができます」とクリエイティブ・ディレクターの杉原は話す。
「往々にして、アスリートと開発側のコミュニケーションは一方通行になりがちです。例えば、“こんな感じになれば、もっといい”と選手が言う時の感覚は、当然ながら目に見えるものではなく、いわば、本人にしか分からない体感的なもの。それらを開発側の僕たちがきちんと理解するためには、『感覚を数値化する』ことが不可欠です。そうすることで、選手の意図をより正確に捉えることができると共に、数値という明らかな指標があれば、伊藤選手と開発チームの互いにとって、現状を把握する助けにもなりますし、ひいては、最大限に力が発揮できるマシンの開発に活かすことができます」とクリエイティブ・ディレクターの杉原は話す。
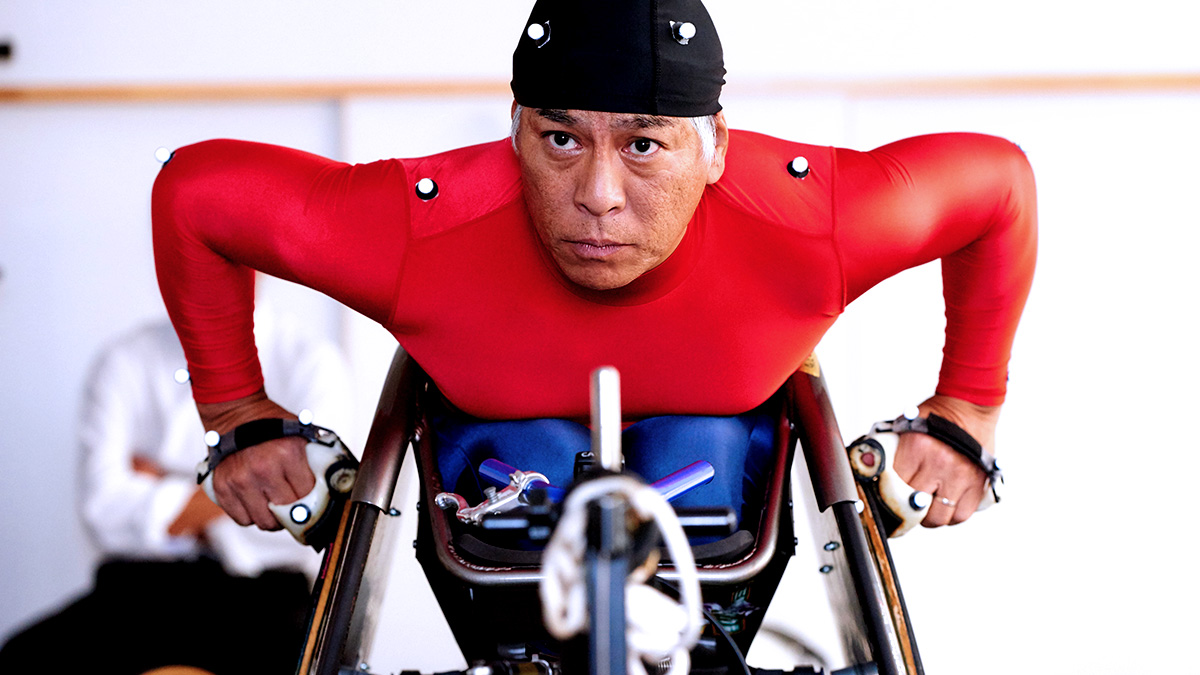
 いざ、感覚の数値化へ。伊藤選手の頭、肩、肘、手首などの可動部と、ホイールなど、マシンの各部には、“マーカー”と呼ばれるモーションキャプチャの計測点が取り付けられた。伊藤選手が、100m走を想定して、屋内練習用マシンをこぐ間、天井の四方に設置したカメラが、伊藤選手とマシンの動きを多方向から撮影すると、認識されたマーカーが、パソコンを介してデジタル化した動作として取り込まれ、スクリーン上に映し出される。
いざ、感覚の数値化へ。伊藤選手の頭、肩、肘、手首などの可動部と、ホイールなど、マシンの各部には、“マーカー”と呼ばれるモーションキャプチャの計測点が取り付けられた。伊藤選手が、100m走を想定して、屋内練習用マシンをこぐ間、天井の四方に設置したカメラが、伊藤選手とマシンの動きを多方向から撮影すると、認識されたマーカーが、パソコンを介してデジタル化した動作として取り込まれ、スクリーン上に映し出される。
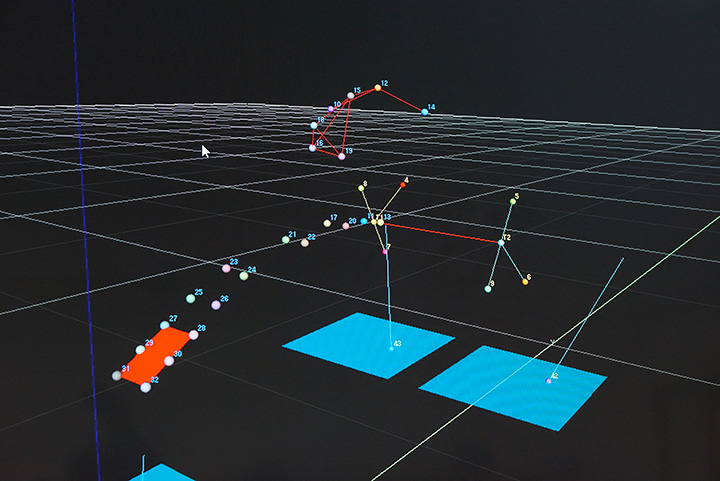 車体のフレームに鼻がぴったりつきそうなほど頭を深く下げた前傾姿勢で、伊藤選手が全力疾走を繰り返す間、計測は続けられた。固定された屋内練習用マシンが、今にも超高速で走り出しそうなパワフルな動きに、開発チームの視線が釘付けになる。「マシンとグローブが“ギア”なら、伊藤選手の腕は“車のエンジン”」と杉原が語る意味が腑に落ちてくるようだ。測定したデータを解析用ソフトに取り込むと、各マーカーの変位量が表示され、それらを繋ぐと、車体や伊藤選手のフォームや動きが浮かび上がる。インターバルを挟みつつも、立て続けに走った伊藤選手の額は、汗でびっしょりだった。
車体のフレームに鼻がぴったりつきそうなほど頭を深く下げた前傾姿勢で、伊藤選手が全力疾走を繰り返す間、計測は続けられた。固定された屋内練習用マシンが、今にも超高速で走り出しそうなパワフルな動きに、開発チームの視線が釘付けになる。「マシンとグローブが“ギア”なら、伊藤選手の腕は“車のエンジン”」と杉原が語る意味が腑に落ちてくるようだ。測定したデータを解析用ソフトに取り込むと、各マーカーの変位量が表示され、それらを繋ぐと、車体や伊藤選手のフォームや動きが浮かび上がる。インターバルを挟みつつも、立て続けに走った伊藤選手の額は、汗でびっしょりだった。
ここで一旦、計測は終了。今回、モーションキャプチャで取得したデータを基に、ハンドリムをこぐ時のフォームや、グローブとの整合性を解析するなどして、伊藤選手にとって最適なハンドリムとグローブの開発が進められていく予定だ。
vol.1 獲るぞ金メダル!東京2020で戦うための究極のマシン開発に密着
vol.3 100分の1秒を左右する“陸上選手のためのグローブ”とは?
vol.4 フィーリングとデータは、分かり合えるのか?
伊藤智也(Tomoya ITO)
1963年、三重県鈴鹿市生まれ。若干19歳で、人材派遣会社を設立。従業員200名を抱える経営者として活躍していたが、1998年に多発性硬化症を発症。翌年より、車いす陸上競技をはじめ、2005年プロの車いすランナーに転向。北京パラリンピックで金メダル、ロンドンパラリンピックで銀メダルを獲得し、車いす陸上選手として、不動の地位を確立。ロンドンパラリンピックで引退を表明するも、2017年8月、スポーツメディア「HERO X」上で、東京2020で復帰することを初めて発表した。









 這い上がるための鍵は、「基本」に戻ること
這い上がるための鍵は、「基本」に戻ること 本来、夏目選手が得意とするのは、時に120kmの豪速で滑ることもある“高速系種目”。その中でも、「スーパー大回転」と呼ばれる種目で好成績を収めてきたが、今回の合宿では、あいにく本調子が出せないままに終わった。次の遠征とワールドカップに向けて、何をどう改善し、挑んでいくのか。
本来、夏目選手が得意とするのは、時に120kmの豪速で滑ることもある“高速系種目”。その中でも、「スーパー大回転」と呼ばれる種目で好成績を収めてきたが、今回の合宿では、あいにく本調子が出せないままに終わった。次の遠征とワールドカップに向けて、何をどう改善し、挑んでいくのか。 RDS社が夏目選手のために開発したマシンがこちら。座位のポジション、滑降中の体の動きやマシンの重心地など、モーションキャプチャやフォースプレートを駆使して緻密な力学的計測を行い、それらの数値化したデータを基に改良を重ね、進化を遂げた高速系マシンだ。
RDS社が夏目選手のために開発したマシンがこちら。座位のポジション、滑降中の体の動きやマシンの重心地など、モーションキャプチャやフォースプレートを駆使して緻密な力学的計測を行い、それらの数値化したデータを基に改良を重ね、進化を遂げた高速系マシンだ。 ピョンチャンパラリンピックに向けて、9月に用具登録を終えた今、マシンについては、調整の段階に入っていく。本番のコースを想定し、シミュレーションをかけながら、セッティングの正確性などをエンジニアリングの観点からさらに詰めていく。中でも、今後大きく調整されていくのが、マシン上部の素材だ。
ピョンチャンパラリンピックに向けて、9月に用具登録を終えた今、マシンについては、調整の段階に入っていく。本番のコースを想定し、シミュレーションをかけながら、セッティングの正確性などをエンジニアリングの観点からさらに詰めていく。中でも、今後大きく調整されていくのが、マシン上部の素材だ。




























