今年8月、メディア初となる現役復帰をHERO X上で宣言した車いす陸上アスリートの伊藤智也選手が、いよいよ動き出した。北京パラリンピックで金メダル、ロンドンパラリンピックで銀メダルを獲得した歴戦の勇士がめざす復帰の舞台は、東京パラリンピック。本連載では、2020年に向けて、RDS社が手掛ける伊藤選手のマシン開発の軌跡を追っていく。9月4日、開発に携わる主要メンバーがRDS本社に顔を揃え、キックオフ・ミーティングが行われた。
 欲しいのは、滑らず、耐久性に長けたグローブ
欲しいのは、滑らず、耐久性に長けたグローブ
車いす陸上において、グローブも、マシン並みに大事だ。既製品の柔らかい布製のグローブに松ヤニを付けるのが今のトレンドだそうだが、伊藤選手が現在使用しているのは、2パーツに分かれた樹脂製のグローブ。走行中は指を折り、固定した状態でこぐ。
「布製のグローブは、ホイールに“面”で当たるので、非常に滑りにくいのですが、接地面のゴム部分は裂けやすく、耐久性は乏しい。対して、樹脂製は耐久性に優れていますが、“点”で当たるので、ほんの数ミリのズレでバーンと外して、滑ってしまう可能性もあります。そうなると、トップから最下位まで一気に落ちてしまいますね」
2020年東京パラリンピックの開催期間は、8月25日から9月6日。ことにグローブに関しては、「季節的にも、雨が降ることを考慮した改良が必要になってくる」と伊藤選手は話す。
「例えば、樹脂のような硬い素材で、接地面だけは柔らかくて耐久性があるものに変えていくとか。目を閉じていても、7時の位置にジャストに降りてきて、蹴ることができたらベストです。あと、グローブは、軽ければ軽い方が好ましいですね。こんなに重たいのを使っているのは、多分僕くらい(笑)。理由ですか?不器用なだけです」
 いよいよ計測、解析の第一歩へ
いよいよ計測、解析の第一歩へ
こちらは、伊藤選手が愛用してきた長距離用のマシンを3Dスキャナーでスキャンしている様子。マシン全体の形状をじっと眺める開発チーム一同から、新たな質問が投げかけられた。
―後部の車輪に“ハネ”は付けない?
ハネをはめると、横風を食らった時に全部持っていかれるので、あまり使ったことがありません。あと、目を閉じると、自分の手がどの位置にあるのかを把握しづらくなる、僕が抱えている障害はそういうものなので、漕いでいる時に、ほんの少しのズレで滑ってしまうと、腕がすぽーんとハネの中に落ちてしまう危険性があります。100mの選手は、総じてハネを付けていますが、今のところ、僕はあえて使わないようにしています。知るかぎり、後部の車輪がフルカーボンの選手もあまりいないですね。ハネを使うのは、重さがあるからじゃないかな。
 次に、走り方を解析するために、モーションキャプチャを使って計測を行った。マーカーと呼ばれる計測点を、肘、肩、手首、背中などの可動部に貼り付けた状態で、伊藤選手がマシンを漕ぐ。その動きを天井に設置された複数のカメラで撮影すると、計測点だけが認識されて、デジタル化した動きとして取り込めるというものだ。
次に、走り方を解析するために、モーションキャプチャを使って計測を行った。マーカーと呼ばれる計測点を、肘、肩、手首、背中などの可動部に貼り付けた状態で、伊藤選手がマシンを漕ぐ。その動きを天井に設置された複数のカメラで撮影すると、計測点だけが認識されて、デジタル化した動きとして取り込めるというものだ。
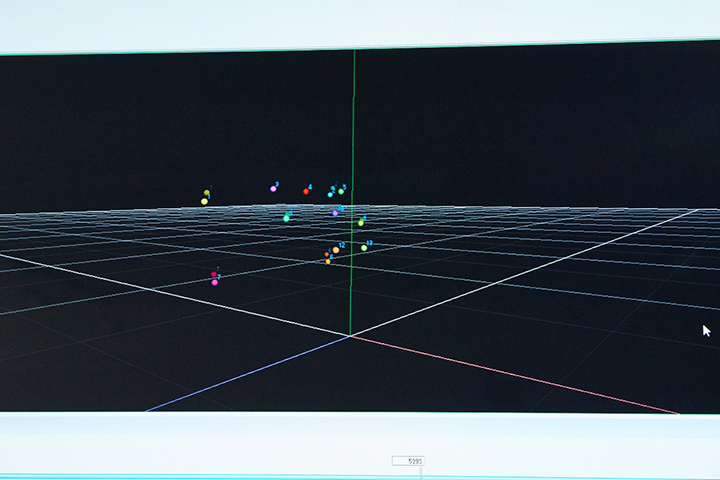 モーションキャプチャのカメラが認識するのは、平面として見えるマーカーの位置(2次元座標)だが、各カメラの位置と角度、原点と座標軸を定義する「キャリブレーション」による情報と、各カメラの2次元座標の情報を組み合わせることで、3次元座標がはじき出されて、映像となる。
モーションキャプチャのカメラが認識するのは、平面として見えるマーカーの位置(2次元座標)だが、各カメラの位置と角度、原点と座標軸を定義する「キャリブレーション」による情報と、各カメラの2次元座標の情報を組み合わせることで、3次元座標がはじき出されて、映像となる。
上記は、走行中の伊藤選手の動きを表した画像。(実際には動画)どれほど正確で精緻なものかは、伊藤選手のコメントが教えてくれる。
「思ったよりもきれいでびっくりしました。良いリズム刻んでますね(笑)。自分の意識の中ではなかったけれど、左腕の方が、肘が上がっているし、漕ぎ方が柔らかいです」
 「各分野のエキスパートの方たちとマシンのことをじっくりお話できて、さまざまな可能性があるんだなと感じました。勝ちにいくために、勝てる状態を自分なりに作っていくので、皆さんよろしくお願いします!」
「各分野のエキスパートの方たちとマシンのことをじっくりお話できて、さまざまな可能性があるんだなと感じました。勝ちにいくために、勝てる状態を自分なりに作っていくので、皆さんよろしくお願いします!」
次回のミーティングまでに、5パターンのハンドリム(持ち手部分)を打ち出すことになった。現段階では、材質にはこだわらず、伊藤選手の手に最も吸い付く形状を探すことが目的だ。2020年に向けて、一つずつ形になっていく伊藤モデル。今後も、その過程を密着取材で追っていく。
vol.2 選手と開発者をつなぐ“感覚の数値化”
vol.3 100分の1秒を左右する“陸上選手のためのグローブ”とは?
vol.4 フィーリングとデータは、分かり合えるのか?
伊藤智也(Tomoya ITO)
1963年、三重県鈴鹿市生まれ。若干19歳で、人材派遣会社を設立。従業員200名を抱える経営者として活躍していたが、1998年に多発性硬化症を発症。翌年より、車いす陸上競技をはじめ、2005年プロの車いすランナーに転向。北京パラリンピックで金メダル、ロンドンパラリンピックで銀メダルを獲得し、車いす陸上選手として、不動の地位を確立。ロンドンパラリンピックで引退を表明するも、2017年8月、スポーツメディア「HERO X」上で、東京2020で復帰することを初めて発表した。