目次
JETROが出展支援する、世界最大のテクノロジー見本市「CES」に参加した注目企業に本誌編集長・杉原行里が訪問。ロボット開発が盛んだった1990年代、自身が所属していた月面探査ロボットの開発チームで有用なモータとして注目されたモータがあった。それが、超音波モータだ。当時からこの開発に携わってきたのが多田興平氏。それ以来、27年間以上超音波モータの研究開発に取り組み、現在は株式会社Piezo Sonicを興し「人の役に立つ製品のため」の超音波モータやそのモータを応用した製品づくりを行なっている。同社の手掛ける超音波モータについて、同社代表の多田氏に聞いた。
共同開発を経て生まれた技術を、
もっと身近に人のために役立てたい
杉原:Piezo Sonicを立ち上げたのが2017年と伺いました。主要技術である超音波モータはいつから関わり始めたのですか。
多田:大学時代に、私の所属していた中央大学國井研究室とJAXAが共同で月面探査ロボットを開発するプロジェクトを始め、私もそのプロジェクトに関わることになりました。そこで月面探査ロボットに有用なモータとして超音波モータが挙がり、超音波モータの宇宙仕様化を自分のテーマとしたことが大きなきっかけでした。
当時は他大学も共同で開発にあたっていて、私たちの研究室は主に回路などのシステム設計や遠隔制御などのソフト面を担当していたのですが、動くモノ:ハードがないとなかなか開発が進められない、という状況が発生していました。ハードウェアとソフトウェアを別々の組織で開発していると、どうしても足並みを揃えることが難しいことがあります。そのため、自分達のシステムやソフトウェアが正常に動くかを確認することを目的として、まずは探査ロボットに搭載することを予定しているロボットアームを作って、サンプル採取実験ができる環境を構築しようという話があがりました。その時点から、制御する対象となるハードウェアは自分で開発した方がハード・ソフトともによりよい結果が得られると考えるようになりましたね。とは言え、私が所属していた大学の学科はどちらかというとハードウェアよりもソフトウェアよりの研究が主体でしたから、ハードウェアの開発は手探りの状態から始まりました。

杉原:大学在籍時から、現場でものづくりもやりつつ、研究も進めていたのですね。超音波モータが開発されたのって1980年くらいでしたっけ。
多田:誕生したのは1975年です。自分と同じ年なので、勝手に運命的なもの感じています。超音波モータ「重量が軽く、同サイズのDCモータよりも高トルク、電力ゼロでバックラッシュレスで姿勢を保つことができる」という特徴があるのですが、当時の超音波モータは制御方法や組み付け方法にクセがあり、このモータを組み込んだロボットアームの制御はハードウェア、ソフトウェア双方からアプローチしてようやく実現していました。その後、ロボットアームのギアユニットを応用して、ロボット本体の走行用タイヤにも超音波モータを組み込んだものを作っていきました。
杉原:月面探査ロボットのモータとして超音波モータが選ばれた理由として、どんな優位性があったのですか。
多田:日本の探査機や人工衛星の場合、ソーラーパネルや搭載しているバッテリーなどの限られた電力で動作することが求められます。特に駆動力となるモータに対してはできるだけ軽く、小さく、消費電力が小さく、かつ高トルクであるという条件が望まれます。そこで、前述の特性、同サイズのDCモータよりもトルクが高く、姿勢を保つために電力を消費しないという超音波モータが注目を集めました。何よりロボットアームなどの多関節構造物に利用した場合、電源を切ってもそのままの姿勢を保てることが素晴らしいと考えられました。姿勢を保つために電力を必要としないだけでなく。ブレーキやクラッチを使う必要がないため、全体の構成をシンプルかつ、軽量にすることが可能になります。現在も、人工衛星のアンテナの展開装置やジンバルなど、超音波モータは宇宙探査機に幅広く応用可能だと考えられています。
杉原:超音波モータの研究に27年以上携わっているとのことですが、大学院の後の超音波モータの研究・開発はどのように行われていたのでしょうか。
多田:大学院を出てからは、研究開発に参加していただいた超音波モータメーカーに就職しました。今までの研究成果もあったため、入社して1年後には技術開発部長として、超音波モータとその駆動回路の研究・開発に携わらせていただきました。その会社の当時の社長さんは超音波モータを世界で初めて生み出した方で、素晴らしいエンジニアだった方でした。さらに超音波モータ以外の「今までにない新しいモータを作りたい」という熱意のある方で、私も新しい超音波モータやその応用製品を作りたいと思っていましたから、お互いに目的も一致していて、研究開発しやすい環境をいただきました。大学での研究はまずはチャンピオンデータがとれればよし、という傾向が強く、繰り返し同じ結果が出ることが求められる「製品」作りとは大きく異なります。超音波モータという同じ題材で、取り組み方が大きく違うことを経験できたことはPiezo Sonicでのモノ作りの成功に大きく影響していると思います。

杉原:前職である超音波モータの会社は2017年まで約10年間勤め、それから、ご自身の経験を総結集させた新しい超音波モータの開発を中心に据えたPiezo Sonicを始めたわけですね。
多田:はい。もともと私は、子供の頃からロボット漫画やロボットアニメが大好きで、将来は人間に係わる、人の生活をサポートするロボットを作りたいと考えていました。そのロボットを実現するための重要な技術であるアクチュエータとして、大学時代から研究開発に係わっていた超音波モータを活用したい、宇宙探索のような特定の分野だけではなく、人の生活に関わるような製品にこそ、超音波モータを応用していきたいという思いでPiezo Sonicを立ち上げました。この考え方が源泉になっていますから、Piezo Sonicが超音波モータとロボットを開発するのは私たちの中では当然のことと考えています。
杉原:なるほど。その考えがあるからこそ、超音波モータだけではなく、その応用製品としての人の生活をサポートするロボットの開発をされているのですね。
「2018年度 モノづくり賞」も受賞した御社の超音波モータ:PSMシリーズの特徴とは?
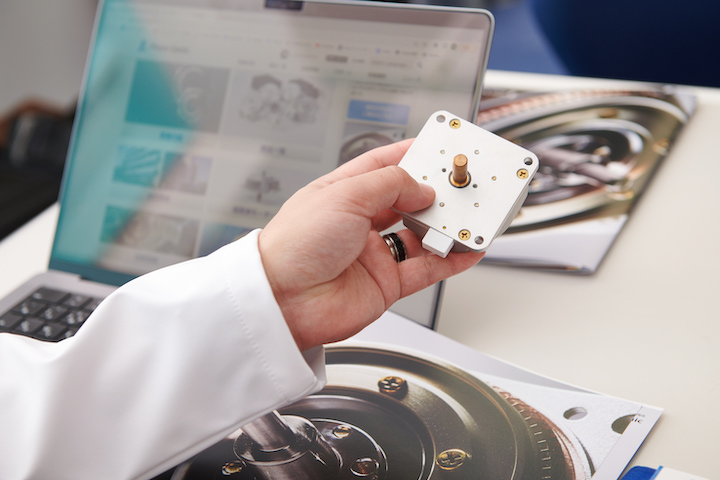
性能を向上しつつも小型化に成功した超音波モータ:PSMシリーズ
多田:PSMシリーズは、他社従来品と比べ最高トルクと制御可能回転数域が20%向上し、サイズは25%の小型化に成功しています。また、超音波モータの短所であった寿命も大幅に延びました。今まで、超音波モータはトルクがあって軽いけど、寿命が短いというイメージを持たれていました。一方、弊社の超音波モータは材料と構造を1から見直すことで他社の超音波モータと比べて2倍以上の寿命を実現しました。位置制御に利用されるモータとしてステッピングモータというものがあります、弊社の超音波モータは同価格のステッピングモータと同等以上の寿命を実現しているため、モータの置き換えとしてエンジニアが細かな寿命計算をすること無しにスペックで検討できるようになっています。また、弊社ではお客様の利便性を第一に考え、モータシャフト(軸)の形状や長さの変更は1個からカスタマイズに対応しています、これもPSMシリーズの大きな特徴だと考えています。
介助する人もされる人も幸せに。
家族の代わりに遠慮なく頼れるロボットをつくりたい
杉原:このモータを活用した人の生活をサポートするロボット、そのロボット作りに対するビジョンやお考えを教えて下さい
多田:私が考える「人の生活をサポートする」ロボットは、単に省人化やコストカットのための製品ではありません。人に代わって、人では難しいことを実行するロボットのことを指します。「人に代わって、人では難しいことを実行する」、10年後の日本が直面する事案として、ロボットが行うべき重要な仕事は「いろいろな理由で介助が必要になった方のサポート」を行うことだと考えています。一般的に、高齢化になり体が不自由になったり、怪我や病気になってしまうと、殆どの場合は家族が介助を行うことになると思います。自分の親族のことですから多くのご家庭で最初は「自分が面倒をみる」という話がでると思います。しかし現実にトイレや入浴、食事の介助などが毎日積み重なってくると、最初の1週間はがんばれたとしても、それを例えば10年続けられるかといわれると、難しいと言わざるを得ないと考えています。
介助する側に精神的、肉体的に大きな負担がかかることは容易に想像出来ますが、実際のところ、介助される側にも精神的に大きな負担が発生します。ちょっとしたことでも毎回頼んでいると、頼むこと自体を遠慮して言えなくなってしまう、例えばトイレに行きたくても我慢してしまう状況が発生し、それが体調不良の原因になってしまうこともあります。ちょっと外に出たい、話に相手になってほしい、今、トイレに行きたいなどの小さな要求を家族に代わって実行できるロボット、そういうロボットができれば介助する側はもちろん、介助される側も楽しく生活ができると考えています。ヘルパーさんなどが同じ仕事をすることは当然できていますが、人ではなく、あくまでも道具であることが気軽に要望を伝えることができる重要な要素だと考えています。
一方、超音波モータのトルクの高さと動作音の静かさ、薄さの観点から、介助する人の足腰をサポートするユニットを作れないか?というお話しを頂くことがあります。ロボットとはちょっと異なりますが、人の生活をサポートする、という意味ではすごく興味深い製品です。
杉原:ロボットそのものではなく、パワードスーツのような発想ですよね。いいですね。
多田:ところが、この超音波モータの特性を生かしてパワードスーツ系の製品をつくろうとしたところ、僕の妻と妻の母からありがたい指摘がありまして……。ふたりとも看護師なので、病院で使うことを想定した利用シーンやデザインを見せて話してみたところ、酷評されました。話を聞いてみるとすごく納得してしまったのですが、病院では患者さんからのナースコールがあれば急いで看護師が駆けつける。それでも待たせてしまうこともあり、家族はすごく心配した状況になっている。そんな中、重装備の人間やロボットがノシノシ歩いてきたら、患者さんやご家族は決していい気分にはならない。介助する側の腰痛などを軽減できればありがたいけれど、走れるものを作ってくれないと困ると。せっかく作ったサポートユニットでも、患者さんやご家族に不愉快な思いをさせることが容易に想像できてしまいました。
でも、倉庫や工場、農場など違った利用シーンではそういうサポートユニットも活躍出来るのでは、と考えています。また、ちょっと変わった発想ですが、ロボットアームを肩や横腹などに固定して自分の考えに反応して動く新たな腕ができたら、それは自分でも使ってみたいです。取り外しできないと怖いですが。
月面探査ロボットの技術を応用した
これからの物流を変える搬送用自律移動ロボット
杉原:現在の御社のロボットはどのような製品ですか。
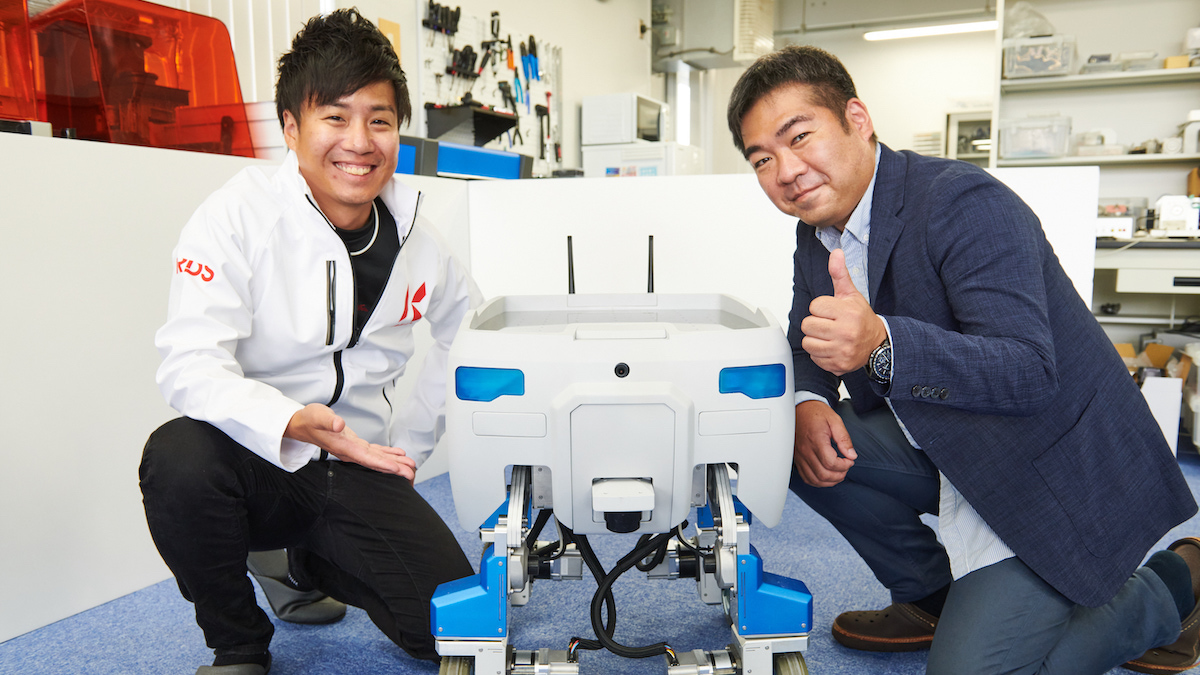
多田:弊社では人の生活をサポートするロボットの第一弾として、物品の搬送業務の省人化や誘導などの業務に貢献できる「搬送用自律移動ロボット:Mighty」を販売しています。搬送ロボットは最近ではレストランの配膳ロボットなどで目にすることが増えていますが、私たちのMightyは月面探査ロボットの開発経験を活かし、走行性にはこだわっています。具体的には15cmの段差乗り越えやその場旋回、真横移動ができる、整地されていない屋外から屋内へと自動搬送を実現することができるロボットです。現在は研究機関や大学だけでなく、ラスト1マイルのロボットによる物流を実現しようとされているお客様のもとで使っていただいています。
杉原:Mightyのこれからの使用用途・ターゲットとしてどのようなところを目指していますか?
多田:大手ショッピングモールや病院、工場で屋外~屋内をシームレスに移動する搬送業務に活用していただきたいと考えています。とは言え、弊社の提案は単純に配送をロボットにより自動化して省人化する、というものではありません。例えばショッピングモールでは、日中は各テナントで販売・利用する商品をこのロボットがバックヤードから自動搬送します。しかも、配送中にお店のセール情報やイベント情報をデジタルサイネージとして表示してアドバタイジングする。それだけではなく限定クーポンを表示できるようにして、そのQRコードをスマホで撮影すると後でサービスが受けられる、などは非常に面白いサービスになると考えています。また、病院や工場では全体の配送システムにこのロボットを組込み、商品・材料が切れる前に自動配送を行うというシステムも非常に有用だと考えています。

同社が開発した搬送ロボットは独自の技術で15cmの段差も乗り越えることができる。
杉原:なるほど。ショッピングモールや病院などの比較的大きな私有地での運用に取り組むことを考えているんですね。
多田:はい。弊社の取り組みとしてはまず、大きな私有地での運用実績を積み上げたいと考えています。現在までに取り組んだ実証実験で感じたことですが、公道を走って荷物を配送する際には、環境認識や行動生成などの技術的な問題点よりも、接触事故などのトラブルが生じた際に利用できる保険制度の構築が重要だと考えています。今年もしくは来年には道交法が代わり、自動搬送のロボットの運用は実現できるようになると思いますが、公道で人とロボットが自由に行き交うまでにはもう少し時間がかかると考えています。
杉原:御社のコンサルティング開発サービスの特徴とは?
多田:弊社の強みは高トルクな超音波モータを販売しているだけではなく、このモータを活用した応用機器を開発できることです。その実証例の一つが搬送用自律移動ロボット:Mightyで、このロボットは2022年の1月にはラスベガスで開催されたCES2022においてイノベーションアワードも受賞することができました。コンサルティング開発サービスでは、弊社が持つハードウェアとソフトウェア、双方の開発力に加え、広報・宣伝までお手伝いする開発サービスです。
コンサルティング開発サービスは従来の受託開発とは異なり、お客様の製品やサービスの開発をお客様と一緒に取り組むことがその要になっています。たとえば新製品のアイデアがほしいとか、自社製品の特長を生かして新製品の設計を行って欲しいというご要望に対応するだけではなく、デザインやコンセプトを考えて欲しいなど、開発対象の内容や状況毎に区切りをつけて、サービスを提供しています。もちろん、その過程の中で必要となる試作や最終製品の量産対応などについても弊社の協力メーカー様と一緒に対応しています。コンサルティング開発サービスはお客様と共に創り上げる開発サービスと考えていますので、駆動力に弊社のモータ以外の製品も積極的に提案しています。

杉原:最後に、なにかメッセージはありますか?
多田:Piezo Sonicは、モータとロボット技術で人の生活を支え、「ケガや病気になっても楽しめる生活ができる社会」の実現を目指しています。これからも多くの協力メーカー様との共創によって、利便性のよい超音波モータの開発・製造と、「人の生活をサポートする」ロボットによる社会課題の解決に対して、取り組んでいきたいと考えています。
多田興平(ただ・こうへい)
1975年、神奈川県生まれ。中央大学大学院理工学研究科修了。大学在学時よりJAXAとの共同研究で月面探査ロボット用モータの開発に従事。共同研究先のモータメーカーに就職後は、超音波モータをはじめとするロボット技術において、機構設計、駆動回路の設計、開発、製造までに至るまで、ほぼすべての工程を担当。2017 年に株式会社 Piezo Sonic を設立。
関連記事を読む