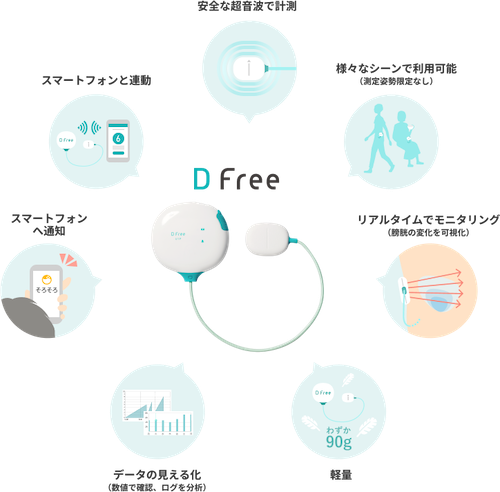
膀胱の尿のたまり具合を超音波でモニターする画期的なデバイスDFree。排尿のタイミングをスマートフォンなどに段階的に通知することができ、高齢者本人が排泄を自立的に行うことができる。また、高齢者施設などでは、介助するスタッフがトイレ誘導やおむつ交換のタイミングをしっかり把握することができるため、入所者のQOL(クオリティ・オブ・ライフ)向上にも貢献しているという。DFreeが生まれたことで、当事者の世界はどう変わっていったのか。開発元であるトリプル・ダブリュー・ジャパン株式会社の代表取締役・中西敦士氏を、福祉・医療分野での課題解決にコミットする編集長・杉原行里が話しを聞いた。
どこにもなかった研究や商品
杉原:今までDFreeの類似的なプロダクトや研究はあったのでしょうか?
中西:ないですね。今もないです。
杉原:超音波を使うことは最初からのアイデアですか?
中西:そうですね。理由はあまりなかったのですが、妊婦さんが1センチや2センチの胎児を超音波で確認することは知っていたので、やはりお腹の中を見るのなら超音波だ、と。
杉原:まさに仮説を立てて、それに向かってスタートアップした感じですね。実際、大腸のあたりでどういう動きがあったら便が出る、膀胱がどういう状態になったら尿が出るというのがわかるのでしょうか?
中西:商品開発の段階では、やはり超音波画像診断装置という医療機器の開発者や大学教授、医師にもかなりヒアリングしまして、医療的なサポートをしてもらいました。我々のデバイスは単純に「お知らせして防ぎます」というよりは、「見える化」して体調管理につなげる点がポイントです。頻尿の人は、不安だから何回も何回もトイレに行って、膀胱が小さくなってしまいます。そういう膀胱トレーニングを心理的にサポートすることにも使っていただいています。
杉原:そうですか。可視化で健康状態を知ることができるのも、もちろん大事なのですが、共通のコミュニケーション言語を手に入れられるというのがすごく大きなファクターだと思います。これは、車いすのかたたちはとても喜びますね。実際にプロトタイプを作り始めてから商品化されるまでは、かなりのトライ&エラーがあったのではないかと思うのですが。
中西:6月に出す最新版が四代目ですね。最初に出したものが2017年4月なので4年くらいかかっています。四代目に移行するにあたって、ケーブルレス化を実現し、かなりコンパクトにしたという点が一番大きいですね。あとは感度やセンサーの精度そのものを向上させており、しかも防水機能も追加しています。
杉原:毎日自分の排泄の状態がわかると、健康診断の内容はどう変わりますか?
中西:そもそも内臓の変化を24時間捉え続けるということ自体が、世界でこれまでなかったことなんです。人間ドッグに行っても、捉えられるのは、その瞬間だけです。例えば空腹の時にはモニターできても、実際に消化されている様子がどうなっているのかは、ほとんどわかっていない。内臓の動きを長時間捉え続けられるということは、可能性が大きい。重大な病気を予防したり、もっとライトなところでは、今騒がしく言われている「腸活」みたいなものが、本当に効いているかどうかを確認できる。非常に重要な健康情報の一つになりうるのは間違いないと思います。
杉原:今は難しいかもしれませんが、大腸の動きが少し鈍ってきたら、大腸がんの型の傾向と照らし合わせると、スクリーニングできますよね。
中西:日本人女性の死因の第一位は大腸がんなのですが、便潜血の検査が恥ずかしいからなかなか病院に行けないという人もいます。そこを、診断とまではいかなくても、もっとライトにアラートを通知できると、救える命も非常に増えるのではないかと思います。
杉原:めちゃくちゃいいと思います。ご存じかもしれませんが、以前HERO Xでは尿検査をIoT化するBisu社に取材しました。彼らは、予防につながるアドバイスという位置付けで、普段の生活習慣の中でコーチングしながら自分の健康を理解するキットを製作しています。御社も診断ではなくコーチングに近いということでしょうか?
中西:そうですね。今はコロナ禍ですからまた別ですが、急患で救急車を利用する人のうち、本当に必要なのは10人に1人といわれています。残りの9人に「明日の朝でいいですよ」と言えるかどうかだけでも、医療資源の最適化に寄与できるのではないでしょうか。
施設のWi-Fi導入が大きな課題
杉原:DFreeの使用が多いのは法人ですか? 個人ですか?
中西:法人です。やはり医療機関や高齢者施設になります。
杉原:高齢者施設で使われる時は、トイレの誘導のタイミングや、おむつ交換のタイミングの通知だと思うのですが、実際に現場の仕事量は大幅に変わるのでしょうか。
中西:仕事量そのものをどう捉えるかというのはありますが、できるだけ入居者が自分でトイレに行くことを叶えたいと思っている施設にとっては、トイレ誘導時の空振りを減らすことができますので、仕事量は減ります。病院などでも空振りが50回近く減ったケースがあります。
杉原:すごいですね。逆に課題はありますか?
中西:法人でいえば、特に営利法人の介護施設では人手不足なので、サービス力をしっかり上げようという余裕がないことがあります。Wi-Fiの導入率も2~3割くらいですし、病院もまだPHSを使っています。このあたりはまだ課題がありますね。
杉原:それは、病院自体が変わることを待つのか、それとも僕ら利用者のほうが進んで変化していくのか。どちらかというと後者のほうが早そうな気がします。
中西:その通りだと思います。介護施設や病院は、お世話になる場所というイメージが強い。例えば治療法への希望や、おむつの使い過ぎについて、かなり言いづらい環境があります。でも、介護施設でも、おむつ代の半分は介護保険、つまり税金から出ています。トイレに連れていけばおむつ代も半分に減らせますから、それに対して我々国民が、声に出してしっかり言う必要があります。介護も医療も財政赤字の中で、介護保険の負担年齢を20歳に引き下げる議論も出ていますが、負担を増やす前に、介護現場をアップデートさせていく力が大事です。我々は、トイレに誘導することによっておむつ代を半減しますという「おむつ月額定額プラン」を用意しています。50床くらいある介護施設ですと、年間で180万くらいコストメリットが出ますので、効果は大きいと思います。
防災大国・日本に
必要とされるプロダクト
杉原:話は変わるのですが、防災のようなものにも紐づいたりしますか?
中西:そうですね。やはり避難所で一番辛いのは排泄です。これが原因で感染症も一気に広がりますし、ストレスが強いとトイレの回数が増えます。ストレスの管理や、いざという時に、ある程度は我慢できるようにトレーニングしておくサポートツールとして使っていただきたいですね。
杉原:日本はこんなに被災しているのに、防災に対して進んでいない部分がすごく多い。食品も含め、有事でも平時でも使えていないと、リアルなプロダクトではないですよね。DFreeみたいなプロダクトは有事も平時も関係ないから、防災の現場ではすごく可能性があると思っています。
中西:ありがとうございます。
杉原:これは着けている時に違和感はあるのですか?
中西:かなり質問されるのですが、今回かなり小さくなって(従来の3分の1)、そこまでの違和感はないですね。へそ下のあたりは、もともとベルトや下着のゴム、おむつ・パッドなどで圧迫感があるところですから。最新版は28グラムで、単三電池くらいです。
杉原:エンジニアの人たちを褒めてあげたいですね。
中西:そうですね。今、下着メーカーとも話を進めています。将来的には湿布みたいな使い捨てを目指したいです。また、これまでは尿に特化していましたが、その次は便のほうに一気に舵を向けていきたいと思っています。

課題先進国としてイノベーションを
杉原:会社を設立されたのがアメリカですよね? それは留学されていたからですか。
中西:それが大きいのですが、設立だけであれば、登記代も含めてアメリカのほうが圧倒的に安かったんです。それから、留学中にベンチャーキャピタルでインターンをしていて。20個ほど事業アイデアを提言して、どれだったら出資してくれますか?というのをやっていました。その時に日本のVCが先に手を挙げてくれたので、結果的に日本でやることになりましたが。
杉原:最初に世界に類似商品はないと言われていましたが、ない理由は世の中には必要ないと思われているからでしょうか? それとも着眼点がないんでしょうか。
中西:ヘルスケア領域は「生きるか死ぬか」という部分が圧倒的に進むので、排泄で失敗しても死なないというところが一番大きい要因だと思います。あとは、類似や競合はないのですが、概念的には、おむつ・パッドが競合ですね。要介護ではないのにおむつやパッドしている人たちは、実際に漏れているというよりは、半分は不安だからつけている。予防的なツールを使って状態をよくしていくというよりは、漏れに対して、いかに二次被害を少なくするかが課題だったんです。ただ、おむつ・パッドというのはやはり環境には非常に悪いです。主成分は全て石油原料で、化学物質です。実は、日本全体の一般ごみ(産業廃棄物)の約4%が使用済おむつといわれていて、2030年には約6~7%になるとされています。日本は世界で最も大人用おむつを使っているという不名誉な状況ですから、地球環境への意識の高まりとともに、次第にこの状況をシフトしていけるといいなと思っています。
杉原:そこはやはり、課題先進国である日本という場所がポジティブに働いているという見方ですよね。
中西:おっしゃる通りだと思いますね。やはり手を挙げてくれた投資家は日本が一番早かったというのは、課題意識が世界で一番進んでいたという認識です。
中西 敦士(なかにし・あつし)
慶應義塾大学商学部卒。大手企業向けのヘルスケアを含む新規事業立ち上げのコンサルティング業務に従事。その後、青年海外協力隊でフィリピンに派遣。2013年よりUC Berkeleyに留学し、2014年に米国にてTriple Wを設立。2015年に日本法人トリプル・ダブリュー・ジャパン株式会社設立。著書:『10分後にうんこが出ます-排泄予知デバイス開発物語-』(新潮社)
(画像引用元:https://dfree.biz/)