
実は筋肉のように鍛えることができるとも言われる脳。ゲーム感覚で脳を鍛える『脳トレ』が一大ブームとなったのは記憶に新しいところ。この『脳トレ』の考案者が今回注目したのが脳の活動具合の〝見える化〟だった。
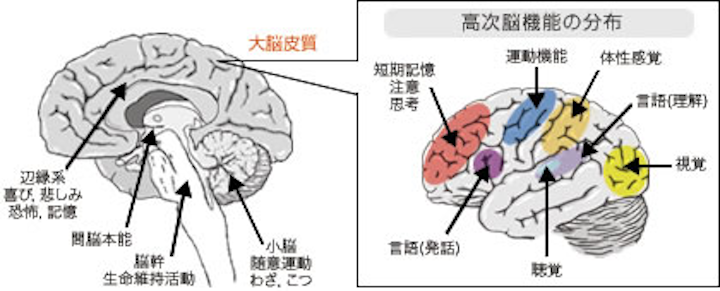
人間の体の不思議はいくつもあるが、脳はその代表格と言ってもいいだろう。自分の脳がどのような仕組みになっているかを知る人は少ないのではないだろうか。脳は大きく分けて「大脳」「小脳」「脳幹」の三つの部分に分かれており、そのうち80%を大脳が占めている。この大脳には前頭葉、頭頂葉、後頭葉、側頭葉の領域が存在し、それぞれ役割が違うのだ。例えば、前頭葉は思考や運動などと関わりが深く、言語を発するのに使われている部分。頭頂葉は手足の感触や動きを知覚するための機能をもつと言われている。
この前頭葉の中でも機能は分かれており、前頭葉の中にある前頭前野は感情をコントロールすることや、考えること、アイデアを出すこと、判断すること、応用することなど、人間らしい部分を多く司るところとなっている。
東北大学と日立ハイテクで立ち上げた(株)NeUでは、前頭前野を光トポグラフィ(NIRS)という技術を使い計測、画面に出される問題に答えることで脳がどのくらい反応しているのかを計ることで、脳トレの効果を見える化できるようにした。その名も「ブレインフィットネス」。
光トポグラフィとは、頭部に3㎝の等間隔で光源と受光センサーを配置することで脳内のどこに変化が起きたかを計測、可視化するもの。「ブレインフィットネス」ではこの光トポグラフィを使った脳センサーをおでこに装着することで、前頭前野の活動具合を計る。

開発に関わったのはあの『脳トレ』を手がけた東北大学加齢医学研究所所長の川島隆太教授だ。ゲームをやるだけだった脳トレでは、その日のスコアなどは分かるものの実際にどの程度鍛えられたかを見ることができなかった。同じ人間といえどもその日のコンディションによってもスコアは変わるため、スコアだけでは脳活動がどの程度行われたかを可視化するのは難しい。しかし、この光トポグラフィ技術を活用することで、脳のどの部分に変化が起こったのかを見ることができるため、出された問題というトレーニングがどの程度脳に効いているかを視覚的に知ることができるようになる。
同社は認知症予防をはじめ、子どもの地頭向上や、ビジネスマンの生産性アップなどへの活用が期待されると伝えている。ダイエットでも結果が可視化されている方がトレーニングのモチベーションを保ちやすいと言われるが、脳トレもパーソナライズ化されたデータとして結果が見えるとなれば、やる気はアップしそうだ。







 最新テクノロジーとしての印象が強い遠隔体験、遠隔就労などは、実はコンセプトとしては長い歴史を持ち、日本では東京大学名誉教授、慶應義塾大学特任教授である舘 暲(たち・すすむ)氏がこの分野の先駆者的研究者として知られている。
最新テクノロジーとしての印象が強い遠隔体験、遠隔就労などは、実はコンセプトとしては長い歴史を持ち、日本では東京大学名誉教授、慶應義塾大学特任教授である舘 暲(たち・すすむ)氏がこの分野の先駆者的研究者として知られている。



























