正しい姿勢や歩き方は、健康をつくるといわれている。また、歩行には様々な病気の兆候があらわれるといわれ、自分の歩行をきちんと把握しておくことは、健康管理の面でも重要だ。NECが開発した歩行姿勢測定システムは、3Dセンサーに向かって歩くだけで、年齢と性別に応じた基準で歩行姿勢を点数化できるシステム。従来なら大掛かりな装置が必要だった歩行のチェックを、利用者の負担なく実施することができる。
あなたの歩行は何歳?
ふらつきや速度の衰えもチェック
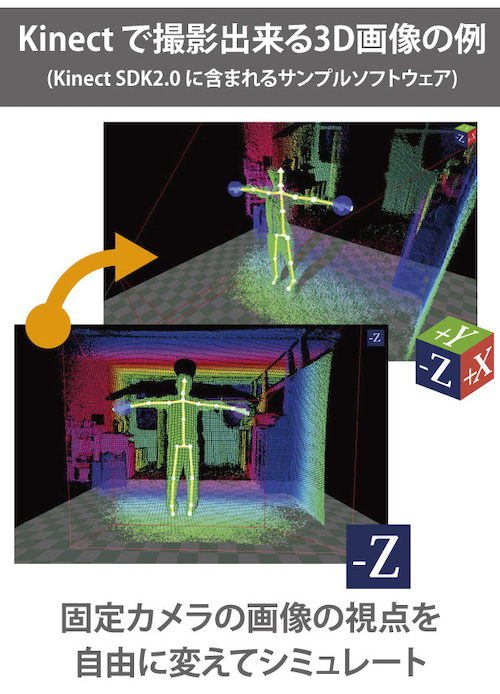
NECの歩行姿勢測定システムは、3Dセンサーに向かって6メートルほどの距離を歩いていくだけで、「歩行速度」「歩幅」「胸腰部の上下動」「足の上がり角度」等を36項目を分析できる。これらを5段階で評価するとともに、速度やバランスなどから「歩行年齢」を算出する仕組みだ。
身体にマーカーなどを着ける必要がないので、利用者が気軽に利用できるのが大きなメリット。個人情報が気になる利用者にはデータを蓄積せずに一時的な測定結果の表示だけを行うこともでき、健康イベントなどでの利用も期待できる。
(画像元:https://www.towahitech.com/nec_walkingform/nec_walkingform.html)
これまで3Dセンサーでの検出が難しかったつま先部分などの測定は、独自の技術でセンシング精度を向上させることができた。つま先の上がり具合は認知症にも関連するといわれているため、高齢者の健康チェックにも大いに役立てそうだ。歩行姿勢基準には特許出願済のアシックススポーツ工学研究所が開発した評価基準を採用している。
治療院などで活用する場合は、データを蓄積して、患者の身体の変化を確認することも可能。リハビリ・健康づくりのトレーニングの効果や、現在行われている施術の効果も確かめることができる。「歩く速さ」「ふらつき」「身体の軸」など、6分野で測定しているため、現在、実年齢と比較して衰えている部分などをしっかりと可視化できる。効果がはっきりと目に見えることで、患者本人のモチベーションアップにもつながる。
歩き方の問題は、いままで本人にはわかりづらかった。歩行が健康に重要な影響を及ぼすことは知られつつも、実際には自覚することが難しく、なかなか治療やトレーニングには結びつかなかった。センシングの技術が発展することで、歩行の問題を本人も治療者も認識できることは、健康づくりに大きく役立っていくだろう。
身体装着のマーカーやベルトがないことも画期的で、身体にハンデがあり器具の装着が難しい人や、認知症が進んでいる人への導入も考えられる。誰もが手軽に歩行をセンシングできることで、健康寿命が延びていくことを期待したい。