カシャカシャ、とロボットの指がピアノの鍵盤に触れ、「ふるさと」のメロディを優しく奏でる。NHK連続テレビ小説「半分、青い。」で5月に放送された、印象的な1シーンだ。このロボットの手を製作した東京都立産業技術高等専門学校医療福祉工学コースの深谷直樹准教授は、独自の“からくり”による機構を使った高性能ロボットハンドの研究開発を行っている。ロボットハンドの現在地と未来予想図を、深谷氏に伺った。
人間の手や指の構造を模倣、
さまざまな形状の物を掴めるように
深谷氏が開発したロボットハンドの特徴は、とても単純な制御だけで、さまざまな形状の物を掴むことができる点にある。従来のロボットハンドには、果物や工具のように一つひとつの形や重さがバラバラなものを持つことが難しいという課題があった。指の一本一本、関節の一つひとつにセンサーやモーターを組み込み制御する方法では、多数の電子部品を制御する複雑なプログラムが必要となる。その分操作やメンテナンスの難易度が高く、電力の大量消費や耐久性といった点からも産業利用には壁があったのだ。

この課題を解決しようと深谷氏が考えたのが、独自の“からくり”だった。“からくり”とは、電子制御に頼らず望ましい動作を実現する機械装置の構造的な仕掛けを指す。
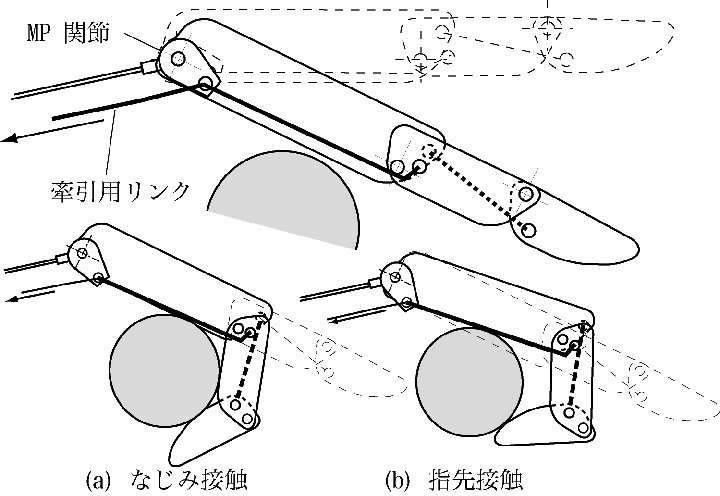
「人間の手や指の微妙な構造を模倣した独自の“からくり”を開発しました。すべての関節が機械リンクで結合していて、物体に馴染み、自動的にバランスを取るというもので、協調リンク機構と名付けています。センサーは使わず、基本的には1個のモーターのみで5本の指を動かします。
具体的にどう動かすかというと、つまみを引くだけ。私たちは普段、物を掴むときに“まず親指の関節を30度曲げて……”なんて思いませんよね。それと同じで、直感的に引くだけで勝手に手前にある物に巻き付くという構造なんです」
これまで、業界ではロボットの指は人間が設計した通り、1ミリ単位で精密に動くものという先入観があったと深谷氏は話す。それによって制御が複雑になっていった。しかし、過程はどうあれ、最終的に物を掴むことができればいいはず。こう考えて仕組みをシンプルにしたことで開発に成功した。
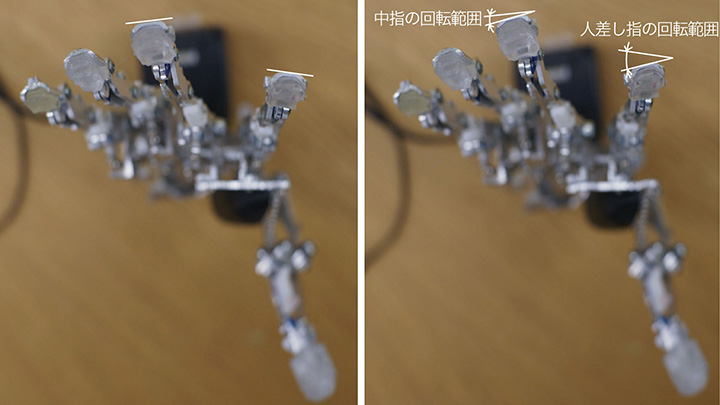
「人差し指と中指だけで、薬指と小指はねじれないんです。物を持つときに親指と人差し指・中指を使うことが多いから、ここだけ進化したのでしょうね。いままで見てきた解剖学の文献には載っていなかった発見でした」
解剖学や人間工学といった分野も横断しながら、深谷氏は少しずつロボットハンドを人の手に近づけている。
“からくり”を応用した3種類のロボットハンド

本研究の枠組みは、新エネルギー・産業技術総合開発機構(NEDO)の委託事業において、ダブル技研と共に行っている。3者は今年1月、“からくり”を応用したロボットハンドを3種類発表した。「F-hand」「New D-hand」「オリガミハンド」だ。
「F-hand」は、人間の手の構造や大きさを模倣した5本指のロボットハンド。前述した果物や工具のほか、ストローなどの細いもの、3kg程度の荷物も持つことができる。

用途として想定しているのは、農作物の収穫や食品工場での箱詰めなど。将来的には、インフラ関係の設備メンテナンス、建築現場での施工、災害現場など危険を伴う場所での作業、家事ロボットとしての食器洗いや掃除などを代替していくことを見込んでいるという。
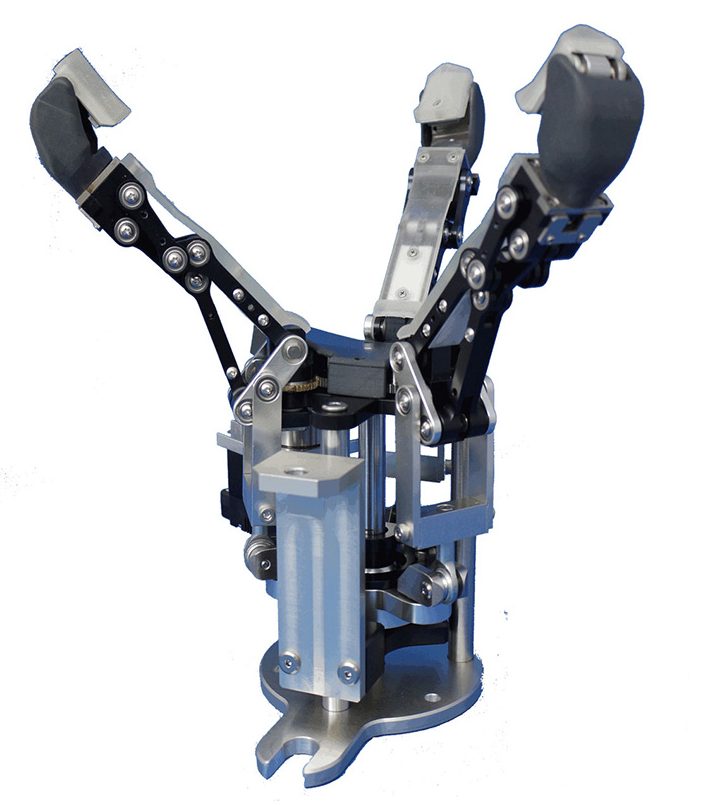 「New D-hand」は、前述の“からくり”、協調リンク機構を持つ指を3本にすることで「F-hand」とは違った特徴を持たせた産業用ロボットハンド。より大きくて重い物を掴むことができるのが特徴だ。物流・製造業における搬送、組み立て、加工工程等に適していて、既にダブル技研を通じて自動車メーカーや研究所などで使用されている。
「New D-hand」は、前述の“からくり”、協調リンク機構を持つ指を3本にすることで「F-hand」とは違った特徴を持たせた産業用ロボットハンド。より大きくて重い物を掴むことができるのが特徴だ。物流・製造業における搬送、組み立て、加工工程等に適していて、既にダブル技研を通じて自動車メーカーや研究所などで使用されている。

金属でできた上記2つのロボットハンドと違い、「オリガミハンド」はその名の通り一枚の紙でできたロボットハンドだ。レーザーカッターで切り出した紙を折り曲げてのり付けするだけの簡単な構造で、つまみを引くと指が曲がる。
鮭やコロッケなど傷つきやすいものを優しく掴める上、金属部品などの異物混入リスクがないため、弁当の具材詰めなどに向いている。縮小・拡大印刷するだけでさまざまなサイズになり、プラスチック段ボールに印刷し強度を増すことも可能。安価で使い捨てができるので、介護ロボや手術ロボなど衛生が求められる現場での活用も期待されている。

なお、「半分、青い。」に登場したピアノを弾くロボットハンドは、「F-hand」を応用し、見た目を昭和55年に開発されたロボットWABOT-2に似せて製作したもの。実際のWABOT-2は指先でタンタンタンと力強くピアノを弾くというが、番組制作スタッフからの「ヒロインの幼なじみが夢を見つけるシーンだから、ドラマチックにしたい」という要望を受け、ロボット的になりすぎないよう、柔らかく滑らかに演奏したという。F-handが人の手に近い構造を持っているからこそ可能になった演奏だ。

深谷 直樹
東京都立産業技術高等専門学校荒川キャンパスものづくり工学科医療福祉工学コース准教授。工学博士。ものづくりを中心とした医療福祉・ロボット関連の研究を行う。